Over the weekend Tesla started pushing the Full Self-Driving Beta 10.11 update to employees, which includes several key improvements for the semi-autonomous driving system. This new version of the software could potentially roll out to drivers with safety scores of 95 and above if no substantial errors were to be found, Elon Musk suggested via Twitter.
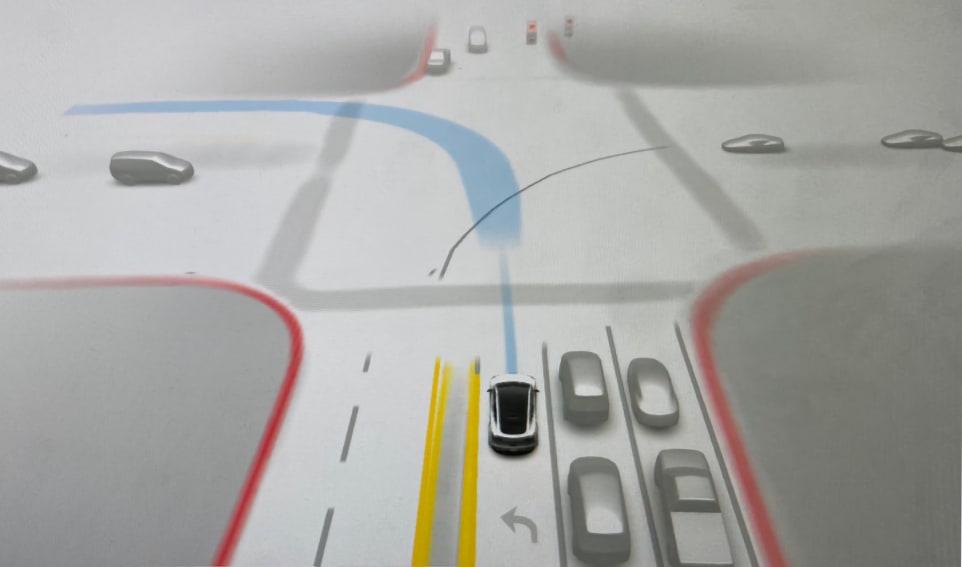
Among the highlights of the new 10.11 release version are more accurate predictions of where vehicles are turning or merging and an improved right-of-way understanding if the map is inaccurate or the car cannot follow the navigation, as well as improved smoothness through turns.
Tesla’s approach to testing their autonomous driving system on real world streets using their own customers instead of trained drivers has drawn a lot of criticism over the last few months, but also a lot of praise from users who have been eager to test these features after purchasing a Full Self-Driving package at a high price.
Lowering the threshold for access to allow drivers with safety scores of 95 will undoubtedly result in a wider range of Tesla users joining the FSD Beta program, some of which have been complaining about the challenges arising from the use of the safety score system, particularly the real life impracticability of obtaining top score ratings.
In the beginning of their more public rollout phase Tesla offered the FSD Beta to drivers who had a score of 100, and over time it lowered this threshold to take in customers with scores as low as 97. According to a previous statement made by Elon Musk, Tesla will continue to decrease the score required to have access to the beta software over time.
This decision to widen the test pool for the FSD Beta seems also very timely given the recent removal by the National Highway Traffic Safety Administration (NHTSA) of the requirement for manual controls in fully autonomous vehicles, in what seems to be a very exciting development in the landscape for the fully autonomous vehicles industry.
The agency has stated that "for vehicles designed to be solely operated by an automated driving system (ADS), manually operated driving controls are logically unnecessary," in response to a request from General Motors.
According to the latest data available, there are around 60,000 customers enrolled in the FSD Beta program in the US alone, while Canadian owners just started to receive access to the driver safety score about a week ago. Tesla is expected to begin the release to Canadian drivers with top scores soon.
Subscribe
Subscribe to our newsletter to stay up to date on the latest Tesla news, upcoming features and software updates.
Tesla has finally released their 2024 Impact Report, and it's filled with impressive new data on the company’s environmental and safety progress. However, the biggest news is the clear and concrete roadmap it provides for the next generation of Tesla products.
For the first time, the report provides specific timelines for Tesla to begin volume production of the purpose-built Cybercab and the ramp-up of the Semi factory. This year’s report shifts from documenting past achievements to defining Tesla’s next phase, with a focus on autonomy and industrial transport.
Upcoming Vehicles
The most significant new items in the report are timelines for Tesla’s anticipated future vehicles.
Next, Tesla is ramping up production of the Semi, following the completion of limited production runs used for testing. This development is closely tied to the ongoing construction of the new Semi Factory, which is nearing completion. Tesla expects this to be one of its largest markets going forward and one of the most impactful. Industrial trucks doing the last 200 miles of delivery account for 16.4% of US vehicle emissions, despite making up only 1.1% of vehicles on the road.
In terms of the Affordable Model, Tesla has mentioned that they intend to launch more affordable products in 2025 and address a key segment of the market. They did not elaborate on this further and seem to have missed the previously provided self-imposed deadline for the first half of 2025.
At this point, we’re unsure whether Tesla will actually launch a distinct and more affordable model or whether it will introduce cut-down versions of the Model Y, as rumored.
Safety
The report supports Tesla’s future plans with some impressive new data points that demonstrate the impact their technology is having.
First, Autopilot (and FSD) has achieved a safety record nearly 10 times higher than the US national average in terms of miles per incident. The data shows one accident for every 6.77 million miles driven with Autopilot (or FSD) engaged, compared to the national average of one accident per 0.70 million miles.
The report also highlighted the Cybertruck’s recent 5-Star overall safety rating from the NHTSA, marking it one of the safest vehicles on the market, especially for a truck. The best part is that Cybertruck holds the lowest overall probability of injury and the lowest rollover risk of any pickup truck ever tested by the agency. Skeptics have always complained about lacking crumple zones, but the results prove otherwise, with Tesla building crumple zones as part of the gigacast.
Sustainability
In terms of sustainability, Tesla’s growing fleet helped to increase the amount of reduced and avoided emissions by 60% year over year, to 32 million metric tons of CO2e. While that’s a small number when you compare it to a full country, it is still a significant impact, especially in cities where pollutants have already decreased due to the ownership of EVs.
Tesla also mentioned that 99% of their recalls reported in 2024 were resolved using OTA updates, saving owners a trip to the Service Center or a trip by the Tesla Mobile Rangers, all in the name of sustainability and reduced costs.
Impactful Report
Tesla’s 2024 Impact Report is actually one of the most forward-looking publications to date. It puts a clear roadmap of Tesla’s future goals, while also tying them into the sustainability and safety goals achieved last year.
We can’t wait till 2025’s report - because it’ll be even better with this year’s deployment of Robotaxi. You can read all 200+ pages of the impact report here.
Tesla has officially begun internal testing of its awaited virtual queueing system for Superchargers. The news was shared by Tesla’s Director of Charging, Max de Zegher on X.
The Tesla Charging team has begun pressure testing the new feature and is planning for public pilots as their next step. While most users won’t experience heavy congestion at Superchargers, for those who do, it could be a real pain point. Virtual queues are designed to make it easier to charge at congested Superchargers by having a digital queue, rather than relying on owners to remain in line with their vehicles.
Virtual Queues
When we originally delved into Tesla’s plans to introduce a virtual queue system, it seemed obvious that the virtual queue would replace the current “Wild West” first-come, first-served system of vehicles trying to get pulled into a stall. This process will likely have two key integrations.
First up is integration directly into the vehicle software for Tesla vehicles. This means that when you’re navigating to a Supercharger that’s busy and virtual queuing is enabled, you will be automatically placed into the virtual queue upon arrival.
Then, your position in line is displayed on-screen and provides an estimated wait time, allowing you to relax, eat, or take a bathroom break without worrying about your place in line. Finally, once a stall becomes available and it’s your turn, you will receive a notification on your vehicle’s screen, as well as on the Tesla app, directing you to the open stall that will presumably only allow your vehicle to charge. We imagine that there will be a grace period for owners to pull up with their car. If that doesn’t happen within a certain period, the next car will likely be offered the charger.
The second integration is in the Tesla app for non-Tesla drivers. As Tesla continues to install Magic Docks and open Superchargers to non-Tesla EVs, more and more traffic comes to the world’s most reliable fast charging network. That means that Tesla also needs to manage expectations and queue times for non-Tesla vehicles, likely through a similar process, but done over the Tesla app instead.
The Devil’s in the Details
A simple “first-in, first-out” queue sounds great, but Max noted that it is easy to exploit things with bad actors. What prevents a driver from joining a queue remotely to reserve a spot, ignoring a notification, or trying to hop into an unreserved spot?
Well, Tesla should be able to manage these fairly easily, but they still require technical effort to implement. That means GPS geofencing for those attempting to join a queue, a short countdown timer for those late to take their spot, and a lockout for those who try to skip the queue are all needed.
What’s Next?
As Tesla has just started internal testing of this feature, it likely means that public-facing user interfaces and flows aren’t quite ready yet, but the underlying functionality is. It also means that Tesla is working to refine the little details to make the process as smooth and as easily accessible as possible.
While no pilot locations have been announced yet, it seems likely that Tesla will launch the pilot at some of the most notoriously busy Supercharger sites to gather testing data in the near future, once internal testing is complete. That means holiday travel routes or major highways, likely in California first, before rolling out elsewhere.
Virtual Queuing is a fantastic tech-first solution for the Supercharger network that helps transform that experience into a more calm and orderly process. Additionally, establishing a fair system that allows both Tesla and non-Tesla EVs to access will likely improve the overall experience. Along with the pilot program for dynamic Supercharger pricing that incentivizes people to use less-congested Superchargers, these changes should improve the Supercharger experience.
While Max mentioned it was designed for “those rare cases with a wait”, that tends to be the experience in larger cities further North, especially in New York, Michigan, or within Canada, where the few smaller Supercharger sites in big cities tend to be heavily congested. These queues will make the experience smoother for everyone involved, so we’re looking forward to seeing this come to fruition.



















![Tesla Autonomously Delivers Its First Vehicle to Customer — And It’s More Impressive Than Expected [VIDEO]](https://www.notateslaapp.com/img/containers/article_images/model-y-2025/newmodely_77.jpg/382e0312c769d0bb2e1234f7ac556fad/newmodely_77.jpg)