Tesla's latest FSD Beta, v10.11 is now going out to public testers. The beta is version 2022.4.5.15. For FSD Beta testers, it'll be the first update they receive that's based on a 2022 release.
Earlier this month Elon tweeted that the beta may go out as early as this past Tuesday. However, he then followed up that it was instead going to go out this past weekend.
Over the weekend we saw FSD Beta 10.11 go out to several employees, which Tesla uses as a final testing phase before releasing to the public.
Today we're finally seeing several public testers getting this build, but it may be a while before it goes out to everyone. Tesla looks at the release carefully as it's going out and can choose to slow it down, speed it up or stop it completely to fix any issues.
When Elon spoke about the next FSD Beta, he mentioned FSD Beta 10.12. This beta is version 10.11. It's not clear whether there was a misunderstanding or whether Tesla initially planned to increment the version.
However, this is a completely new beta for all public testers and it appears to be packed with improvements.
The most notable improvements appear to be new vector-based lanes and reduced slowdowns. An example of the new vector-based lanes is below. In addition to clearer lane markings, it appears that the whole lane will also be highlighted in blue when the car starts to perform a lane change.
New vector lanes
@MarkHalleyPhd/Twitter
This beta is expected to hit Canada for the first time according to Elon, but there are no signs yet of it going north of the border.
Tesla will likely monitor it for several days in the US before releasing it to our northern neighbor.
The complete FSD Beta release notes are below:
- Upgraded modeling of lane geometry from dense rasters ("bag of points") to an autoregressive decoder that directly predicts and connects "vector space" lanes point by point using a transformer neural network. This enables us to predict crossing lanes, allows computationally cheaper and less error prone post-processing, and paves the way for predicting many other signals and their relationships jointly and end-to-end.
- Use more accurate predictions of where vehicles are turning or merging to reduce unnecessary slowdowns for vehicles that will not cross our path.
- Improved right-of-way understanding if the map is inaccurate or the car cannot follow the navigation. In particular, modeling intersection extents is now entirely based on network predictions and no longer uses map-based heuristics.
- Improved the precision of VRU detections by 44.9%, dramatically reducing spurious false positive pedestrians and bicycles (especially around tar seams, skid marks, and rain drops). This was accomplished by increasing the data size of the next-gen autolabeler, training network parameters that were previously frozen, and modifying the network loss functions. We find that this decreases the incidence of VRU-related false slowdowns.
- Reduced the predicted velocity error of very close-by motorcycles, scooters, wheelchairs, and pedestrians by 63.6%. To do this, we introduced a new dataset of simulated adversarial high speed VRU interactions. This update improves autopilot control around fast-moving and cutting-in VRUs.
- Improved creeping profile with higher jerk when creeping starts and ends.
- Improved control for nearby obstacles by predicting continuous distance to static geometry with the general static obstacle network.
- Reduced vehicle "parked" attribute error rate by 17%, achieved by increasing the dataset size by 14%. Also improved brake light accuracy.
- Improved clear-to-go scenario velocity error by 5% and highway scenario velocity error by 10%, achieved by tuning loss function targeted at improving performance in difficult scenarios.
- Improved detection and control for open car doors.
- Improved smoothness through turns by using an optimization-based approach to decide which road lines are irrelevant for control given lateral and longitudinal acceleration and jerk limits as well as vehicle kinematics.
- Improved stability of the FSD Ul visualizations by optimizing ethernet data transfer pipeline by 15%.
- Improved recall for vehicles directly behind ego, and improved precision for vehicle detection network.
Release Notes Explained
Here is a great video that explains Tesla's technical release notes and what improvements you can find in this release.
In addition to the improvements in this FSD Beta, testers can also expect to find these other features that were added in the 2022.4 update.
Range Display Calibration for LFP batteries
If you have a SR+ with an LFP battery, then you'll also receive this feature that charges your car to 100% to help improve battery calibration. LFP batteries have very similar voltages from a low state of charge to a high state of charge. If the battery isn't regularly charged to 100%, it can be difficult for the vehicle to know its state of charge, which could cause some issues.
Cabin Camera
Tesla is collecting additional analytics from the cabin camera to help develop additional features. Tesla is asking you to opt-in to cabin camera analytics if you'd like to help develop new features.
There's no word on what these new features may be, but it could be just about anything, such as the ability to send you a notification if it detects an animal in your car and you forgot to turn on Dog Mode.
Car Colorizer
We're probably all familiar with this feature by now that allows you to alter the exterior color of your vehicle. The color you pick is used in the car's visualizations, car menus and in the Tesla app. You can also view a video of Tesla's Car Colorizer feature.
Audio Sources
The ability to disable certain audio sources comes back in 2022.4. If there are audio sources that you don't use, such as TIDAL, Spotify, or TuneIn, you can now disable them.
When an audio source is disabled, it won't appear in the More Apps menu or in the Sources dropdown.
Icons in the Status Bar
2022.4 was released quite a while ago, so it's easy for FSD Beta testers to forget everything that is in this release and why they should be excited.
Some icons are now returning to the car's top status bar, such as Driver Profiles (while in park) and the Sentry Mode icon.
Save Dashcam Clips
You can now more easily save dashcam clips if you have the Dashcam viewer in your launcher. Since the dashcam viewer can't be used while driving, the icon now has a dual purpose. If you tap it while in Drive, your car will save the last ten minutes of footage.
Regenerative Braking in Autopilot
Additional regenerative braking is now used in Autopilot, which will be especially useful in FSD. The vehicle previously used regenerative braking while on AP, but it will now apply it at lower speeds that better match how a driver would use regenerative braking.
Windshield Wiper Defrost
If you have a new Tesla that was built in the past few months, then it may have windshield wiper heaters. If it does, then this is the software update that enables it.
Nearby Superchargers
You can once again view nearby Superchargers in the same way you could in Tesla's v10 software. The Superchargers icon now appears on the far side just like it used to.
This FSD Beta release is an exciting one that includes many new features with the updated FSD Beta build and in the public 2022.4 release. You can also view the full 2022.4 release notes.
Subscribe
Subscribe to our newsletter to stay up to date on the latest Tesla news, upcoming features and software updates.
Another quarter has passed, and that means it’s time to submit questions and vote for Tesla’s Q2 2025 Earnings Call. While Q1 was a tough quarter for the company, Q2 saw some recovery in sales, although there’s still some work to be done.
However, there’s always a lot to be excited about during Tesla’s Q&A session, where we usually learn a lot about future software improvements and upcoming vehicles. We may hear more about FSD Unsupervised, Robotaxi, or the more affordable vehicle, or its upcoming larger 6-seater Model Y, the Model Y L. Tesla also mentioned a potential FSD price hike back in the Q1 2025 Earnings Call, so that could be something that is brought up as well.
Tesla’s Q2 So Far
Tesla has already released their Q2 2025 Production and Delivery numbers, which were up from Q1 of this year, but still down compared to Q2 last year.
Production
Deliveries
Model 3/Y
396,835
373,728
Model S, X, and Cybertruck
13,409
10,394
Total
410,244
384,122
How to Submit & Vote
Tesla lets shareholders submit a question that will be voted on and may be answered during the Q&A session. To submit your own question or vote on an already submitted question, you’ll need to be a verified shareholder. You can go to Say’s platform and link your brokerage accounts.
Once it is verified, you’ll be able to log in and vote your shares on your own question, or on someone else’s question.
Here’s the link to get started on Say’s Tesla Q&A. You must submit your questions and votes by July 23rd, 2025, at 4:00 PM EDT.
Top Questions So Far
Unsurprisingly, people have already been submitting questions, and here are the top ones so far.
Can you give us some insight how robotaxis have been performing so far and what rate you expect to expand in terms of vehicles, geofence, cities, and supervisors?
What are the key technical and regulatory hurdles still remaining for unsupervised FSD to be available for personal use? Timeline?
What specific factory tasks is Optimus currently performing, and what is the expected timeline for scaling production to enable external sales? How does Tesla envision Optimus contributing to revenue in the next 2–3 years?
Can you provide an update on the development and production timeline for Tesla’s more affordable models? How will these models balance cost reduction with profitability, and what impact do you expect on demand in the current economic climate?
Are there any news for HW3 users getting retrofits or upgrades? Will they get HW4 or some future version of HW5?
When do you anticipate customer vehicles to receive unsupervised FSD?
And here are some other ones we found interesting:
Have any meaningful Optimus milestones changed for this year or next and will thousands of Optimus be performing tasks in Tesla factories by year end?
Are front bumper cameras going to be necessary for unsupervised full self driving? If so, what is the companies plan to retrofit vehicles that do not have them?
Will there be a new AI day to explain the advancements the Autopilot, Optimus, and Dojo/chip teams have made over the past several years. We still do not know much about the HW4.
Earnings Call Details
Tesla will hold its earnings call on Wednesday, July 23rd, at 4:00 PM EDT. It's still early for an access link, but we’ll make sure we have a link up on the site before the earnings call that day.
If you do miss the earnings call, no worries. We will provide a full recap following the call, and we’ll also do some in-depth dives into what was said and what we know.
Tesla’s Summer Update, 2025.26, has finally launched, bringing with it a batch of interesting new features for some, and a bunch of quality-of-life improvements for everyone else.
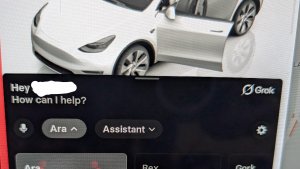
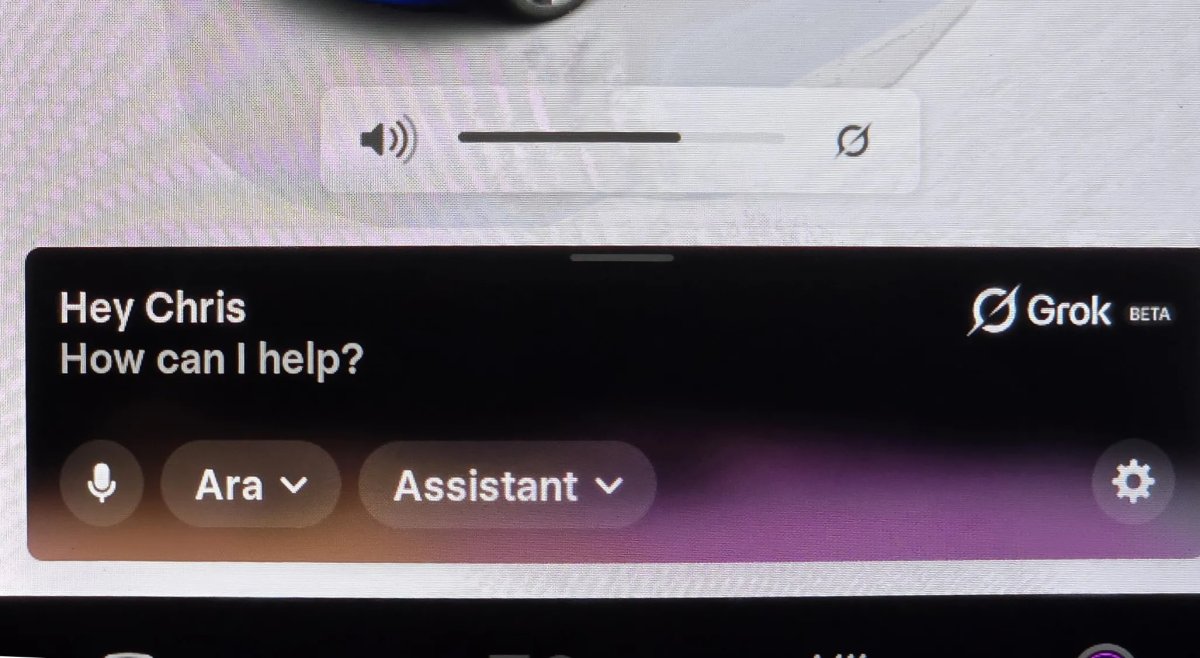
Grok AI Assistant
The star of the Summer Update is Grok, xAI’s conversational AI assistant, which has now landed in Tesla vehicles. For now, it's available in any Tesla that has an AMD processor and is potentially coming to Intel-based vehicles in the near future. The feature is also only available in the U.S., but it’s expected to expand to other regions — hopefully soon.
Grok is in its first iteration as an in-vehicle assistant, and for now, cannot control the vehicle, which means that Tesla’s voice command system is still intact. However, there is a lot it can do already. Grok is activated by pressing and holding the voice button (right scroll wheel on older vehicles), while a short press of the button is still reserved for voice commands. Grok will support a wake word in the future, letting you activate it without pressing a button.
You don't need to sign into Grok to use it in your Tesla!
It can't currently control anything in the car, but it does seem context aware that it is in a vehicle. pic.twitter.com/IpatR7sjiJ
Once Grok is open, which can also be done by tapping the Grok app icon, users can tailor the AI personality according to their preferences by selecting a persona and voice of their choice.
There are also several other settings for Grok under the settings button. You can enable NSFW mode, Kids Mode, or disable access to your vehicle’s location.
Grok has contextual awareness of your vehicle location, which means it can provide relevant answers to questions like “Where should I go for dinner?”
Logging In Not Required
Grok is free with Premium Connectivity, or if you’re using your phone’s hotspot feature or connected to WiFi, so anyone can try it for free. In fact, you don’t even need to log in to start using Grok. However, logging in adds some additional features.
If you’d like to log in, you can do so by scanning the QR code in the vehicle, which will provide chat management and transcripts, SuperGrok access (if you pay for a subscription), and better privacy control.
Tesla has added a new Light Sync feature that pulses the vehicle’s ambient lighting in sync with the music being played. This option is turned on under Toybox > Light Sync. There are also a few options, including the ability to match the ambient light colors to the album’s artwork, instead of using your selected color.
In addition, in Park you can enable Rave Cave when parked, which cranks up the ambient lighting brightness to the maximum.
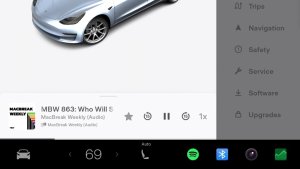
Dashcam App Update
The Dashcam app now allows you to adjust playback speeds, just like the older Dashcam Viewer, which is still used on Intel-based vehicles.
In addition to adjusting playback speed, you can now adjust the video view so that it’s displayed without being obstructed by the buttons at the top (video below). The difference is small, but could be useful if you’re trying to see something slightly out of view or that’s hidden behind the top Dashcam buttons.
While the Cybertruck has also received the updated Dashcam Viewer with this update, it does not have the new B-pillar camera recordings like other HW4 cars.
Sentry Mode is getting one of the best uses of the vehicle’s ambient lighting that we’ve seen so far. The ambient lighting will now slowly pulse red while Sentry Mode is activated to grab someone’s attention, instead of just relying on the vehicle’s display.
While you can disable Sentry Mode sounds, we’d love to see an even more stealthy Sentry Mode that also disables the ambient lighting and screen, allowing the vehicle to record without anyone being aware.
Since the ambient lighting is being used in this case to make people more aware of a feature, Tesla could also use it in other modes, such as Dog Mode.
There are a lot of potential uses for ambient lighting. Tesla can make it glow while the vehicle is charging, with the brightness potentially related to the vehicle's charge level.
When you navigate to a Supercharger, new icons in the charger list will indicate locations that require valet service or pay-to-park access.
Upon arrival at the location, a notification will appear on your screen, displaying important details such as access codes, parking restrictions, level/floor information for parking garages, and restroom availability. This information will also be available on the site card in the navigation.
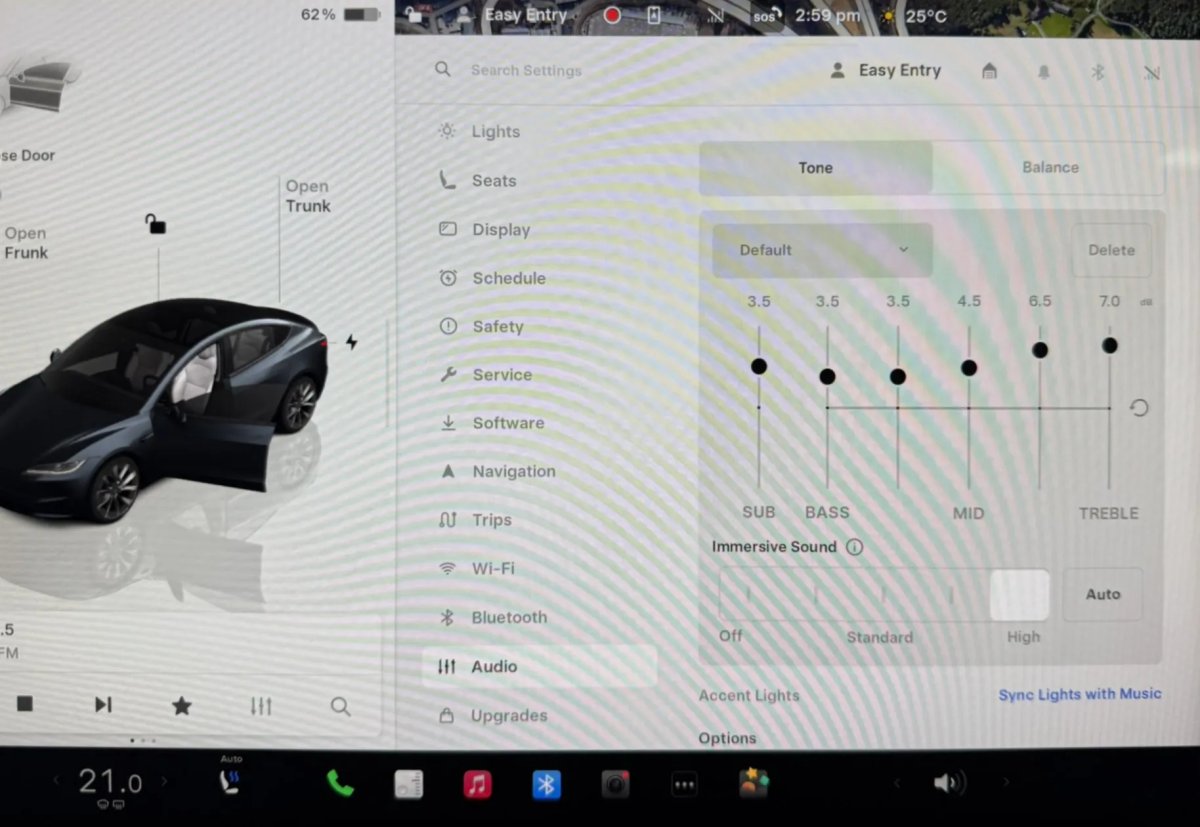
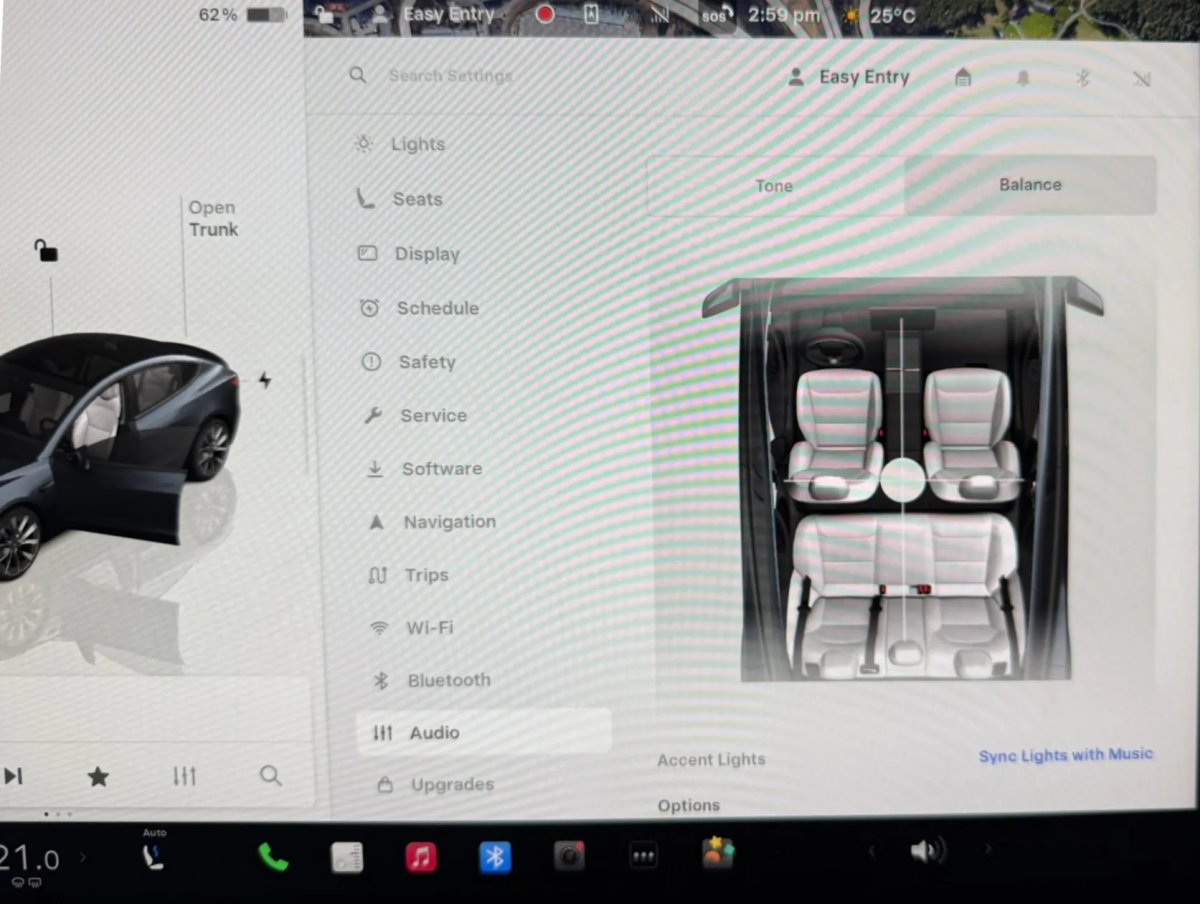
Equalizer Presets
max_bracco/X
Tesla has moved the audio settings from the music player, directly into the vehicle settings — making them much easier to find. In addition to creating a new “Audio” section in settings, you can now create and save equalizer presets.
Each preset can have a name, custom EQ settings, and a setting for immersive audio.
max_bracco/X
Onboarding Guide
Not a Tesla App
Tesla has introduced a new Onboarding Guide for new owners. The guide covers driver settings, touchscreen use, steering wheel and seat setup, and how to control key portions of the vehicle, including lights, wipers, and Autopilot features.
The Onboarding Guide is automatically initiated when a new owner accepts delivery of a Tesla, or can be manually initiated at any time by going to Controls > Service > Onboarding Guide.
This appears to only be available for the new Model 3 and new Model Y.
In typical Tesla fashion, this 2025.26 update is rolling out gradually in small waves initially. Three waves have already gone out, so all signs are looking good for it going into a wide release soon.















![First Look at Tesla’s 2025.26 Update [Photos + Videos]](https://www.notateslaapp.com/img/containers/article_images/2025/grok-app.webp/f66c0424fde99ab9adb2b041d854f723/grok-app.jpg)