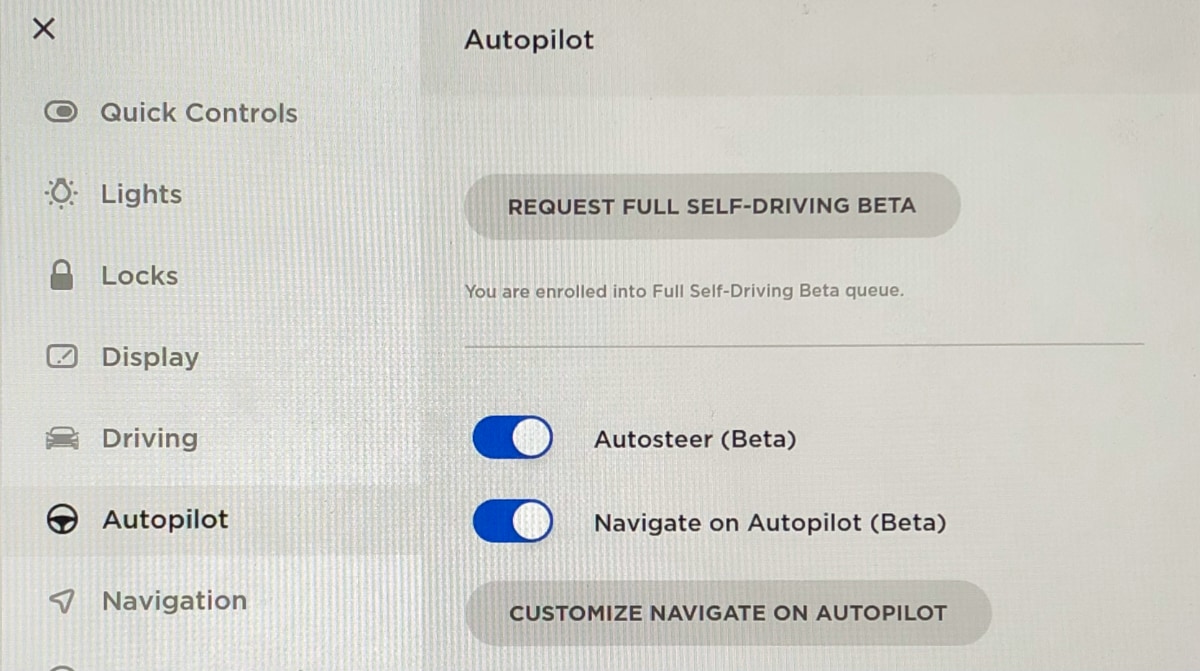
The "Request Full-Self Driving Beta" button has now become available in Canada in the latest software update, version 2022.4.5.4. If you decide to opt-in, you will be enrolled in the FSD Beta queue and a “Safety Score” will become available on your mobile app.
Tesla's Safety Score launches in Canada
If the FSD rollout in Canada follows the same process as the US, you will have to achieve a perfect 100 Safety Score for a week before being permitted to download the software.
In the US, first entries into the beta required a score of 100, then 99 and eventually 98. Few owners with a score below 98 got in and owners who achieved even a 100 score later on still haven’t been included. Enrollment for FSD can be expected to follow the same process in Canada.
Tesla calculates the Safety Score by assessing your risk across five major categories. The five categories in order of weighted average score:
1. Forced Autopilot Disengagements
2. Hard Braking
3. Aggressive Turning
4. Unsafe Following
5. Forward Collision Warnings
In the mobile app, users can see the Safety Score breakdown for each category and compare it to the Tesla fleet median. Users can also see how a specific trip affected the score and pinpoint instances of unsafe driving. Tesla will show you which driver profile was used for an individual trip which is a useful feature for monitoring how the vehicle was handled by new drivers or when using a valet service or car rental service.
Your Safety Score in the Tesla app
If you find yourself with a score below 100, you can improve it in one of two ways. You can achieve higher scores in future drives so that your average score is raised, or you can wait to have your low scores fall off after 30 days.
You can increase your overall score to 100 by avoiding penalties in the previously listed categories. Here are 5 ways to get the 100 Safety Score required for Tesla FSD beta:
1. The primary category that affects the safety score is Forced Autopilot Disengagement. This happens when the vehicle warns the driver to apply resistance three times without driver intervention. They will also occur if you exceed 90 MPH for vehicles with radar or 80 MPH for vision-only vehicles, while on Autopilot. This can be easily avoided by applying resistance when required.
2. If Hard Braking is bringing down your score you should brake gradually to avoid any penalties. If you need to slow down quickly, it may be useful to put the vehicle into Autopilot to let Autopilot slow down for you. This is the toughest category to master and you will need to slow down more gradually than you’re likely used to.
3. When it comes to aggressive turning, you'll want to make sure you're not going too fast around turns. The tighter the turn, the slower you must go to avoid penalties.
4. If Unsafe Following brings down your score, you can try to use Autopilot more often and make sure you’re leaving more of a distance between your vehicle and the car in front of you.
5. Finally, we have Forward Collision Warnings. This warning occurs when your speed is too high relative to the distance you have to the object directly in front of you. If you find that you get a lot of Forward Collision Warnings, you can set your alert level to 'Early'. This way you'll be made aware of the potential collision before getting penalized for it.
The Request FSD Beta button
Another potential way of improving your score is to not count your current drive toward your Safety Score if you think you’ll be penalized. If you perform a soft reset before you park your car, the drive will not be registered and will not count toward your overall Safety Score. This is expected to be patched in a future update.
Only the last 30 days of your driving history are counted toward your Safety Score. You can track your Safety Score progress using our Tesla Safety Score Calculator where you’ll enter your target score and it’ll determine how many more miles you'll need to drive to reach (with a perfect score) in order to reach your target.
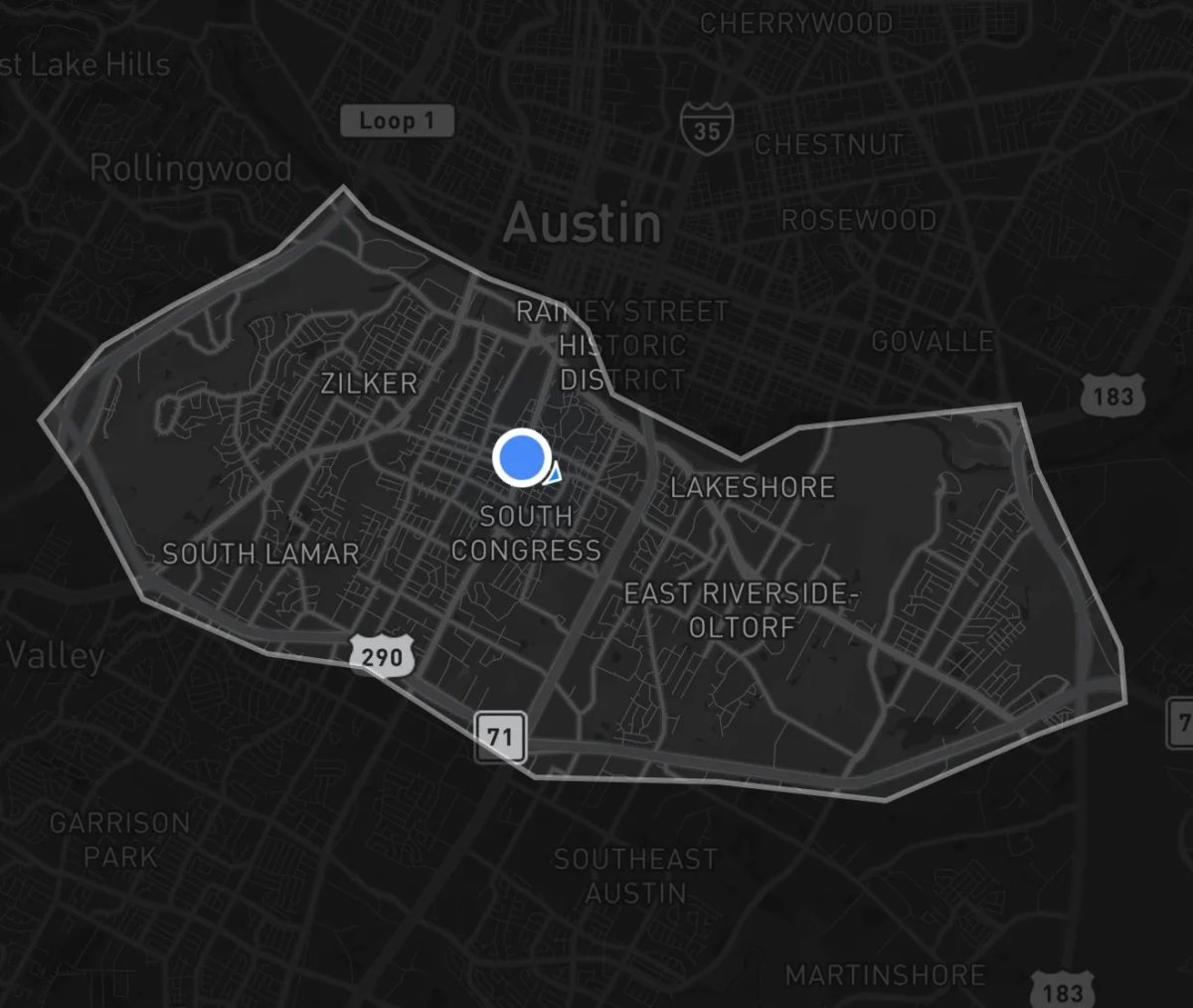
Last night on X, Elon Musk confirmed that Tesla will be expanding the service area for its Robotaxi Network pilot in Austin, Texas, this coming weekend. This is the first official confirmation we’ve had of a date for expansion, following news that Tesla is hiring more Vehicle Operators and plans to expand the Robotaxi supervisor ratio in the coming months.
This is a sign of Tesla’s confidence in the Robotaxi pilot program and its current FSD builds.
Expanding to a larger service area in Austin this weekend
The announcement confirms the sights we’ve been seeing of Tesla’s engineering validation vehicles focusing on areas outside the initial geofence. This public test shows that Tesla was likely finalizing FSD builds and gathering the necessary safety data to push the boundaries for the service, and this upcoming weekend’s expansion will be the first direct result of that work.
Given the increase in service zone size, this expansion will also likely include the addition of more vehicles to the initial Robotaxi fleet of approximately 20 vehicles. We expect the new number to be anywhere from 30-50 vehicles serving both the original and new areas, combined, based on Tesla’s previously expected rollout schedule.
What to Expect
While the exact new boundaries haven’t been released, it is almost certain that the expansion will include the South Congress Bridge and the downtown core areas of Austin. Expanding into a dense urban zone will include more complex intersections, heavy pedestrian traffic, and a unique road layout. That is a major vote of confidence for Robotaxi FSD’s capabilities.
The expansion will also help Tesla to close the service area gap with Waymo, its primary autonomous competitor in the city. This quick expansion is a sign of just how scalable Tesla’s vision-only approach is, versus Waymo’s arduous and drawn-out mapping processes.
We also expect that with this first service zone expansion, Tesla will continue to invite more people to its Robotaxi Network in the coming weeks. Tesla has already sent out various rounds of events, as they’ll need users to continue using the system. If you’re waiting for an invite, it may be time to start getting excited about the next rollout.
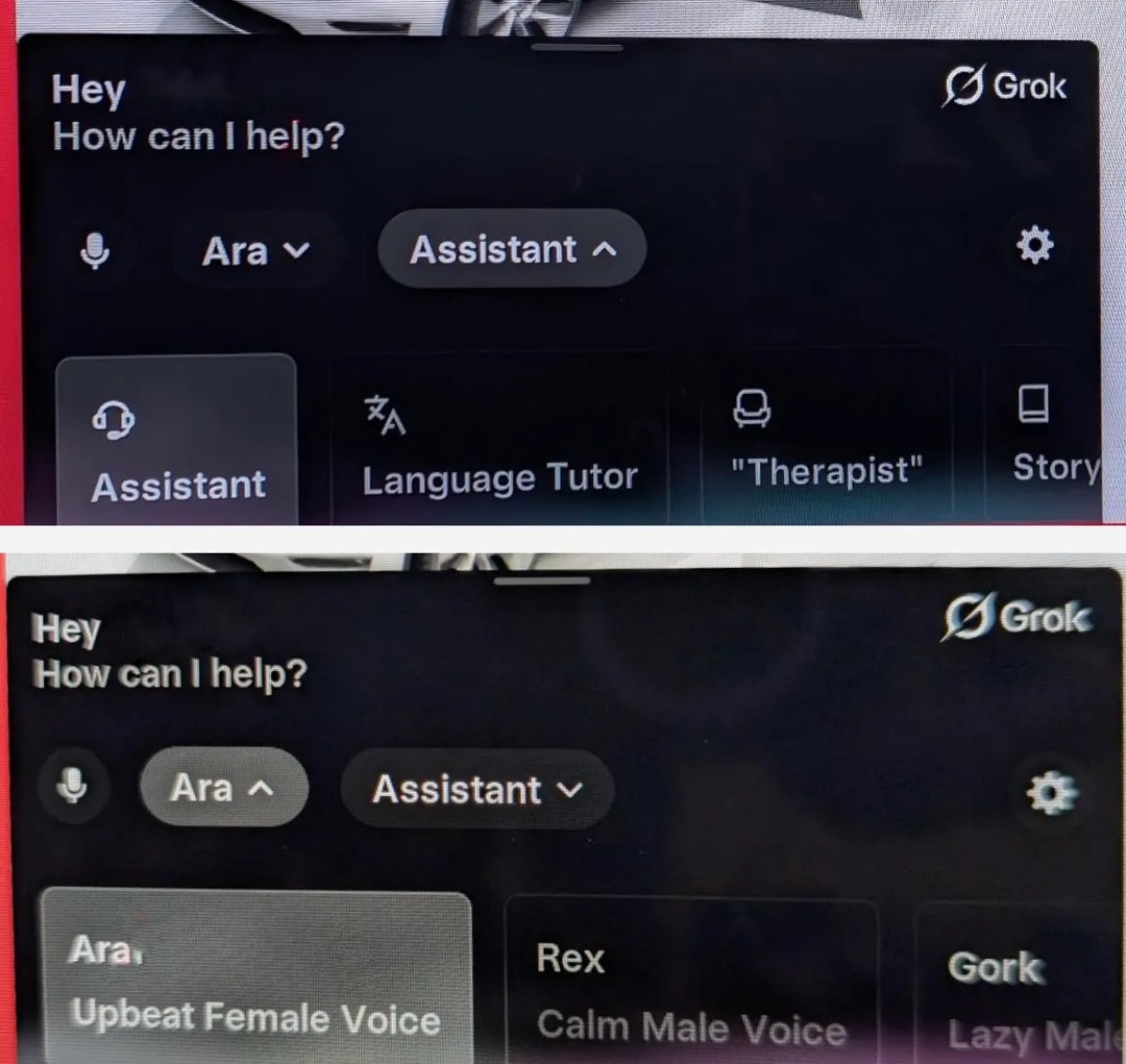
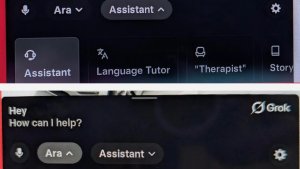
We’ve been hearing about Grok, xAI’s AI assistant, coming to Teslas for almost two years now, but this is finally coming to fruition soon. XAI unveiled Grok 4 last night, but the entire stream didn’t mention Teslas. However, Musk later posted on X that Grok will arrive in Tesla vehicles “by next week.”
Between leaks and the Grok mobile app, there’s a lot we already know about Grok, but there are a few missing pieces that will be cleared when it finally arrives.
Next Week, or Next Next Week?
Musk said that Grok would arrive by next week, meaning it could arrive before then. However, based on how Musk typically states Tesla timelines, there are a few things to consider that give us a better idea of what to expect.
First, whenever Musk posts a Tesla timeline on X, he typically means when it’ll be released to employees and not a public release. Expect this to be the same thing.
Tesla releases software updates to employees first for a final round of testing before starting a gradual release to the public. Sometimes issues are found, especially with FSD updates, and the update needs some fixes before being released publicly. So expect employees to get it by next week, and not necessarily normal Tesla owners.
The second part to this is that Tesla always rolls out their updates gradually, so when it does finally arrive, it’ll only be available on a small percentage of vehicles. Tesla will gradually monitor issues and logs, continuing the rollout as long as no major issues are found.
Which Software Update?
The entire Grok UI was already included in software update 2025.20, but it’s not exposed to users. Typically, a new feature like Grok requires a vehicle update to be added; however, this version may be different, as it’s locked behind a server-side configuration.
Tesla likely has the ability to enable it for all supported vehicles with a simple switch. However, we feel more confident in it being rolled out in Tesla’s next major update, which is likely to be 2025.24 or 2025.26. Rolling it out in a new update aligns with how Tesla has historically introduced features.
If they turned it on for everyone at the same time, they could be exposing everyone to potential new issues, rather than only a smaller segment of users. While Grok is now well-tested through X and the Grok app, there are several elements that are new in Teslas, likely including the ability to control various vehicle functions, such as opening the glove box or other capabilities that voice commands are currently capable of. The Grok interface in the vehicle is also entirely new and may have some bugs associated with it that will need to be addressed, especially if they impact other features.
What we can likely expect is that Tesla will make some tweaks or bug fixes to Grok with the next major update that weren’t included in update 2025.20 and they’ll begin rolling it out to employees and then customers.
Supported Vehicles
Speaking of supported vehicles, thanks to the behind-the-scenes look at Grok, we have a good idea of the vehicles that will be supported. Tesla uses the same code for most of its vehicles, but then it’s compiled for each type of hardware. However, only the needed code is compiled for each vehicle, meaning that some pieces are left out entirely. Unfortunately, Grok code is not included in Intel software builds, meaning that only AMD Ryzen-based vehicles will receive Grok, at least initially.
We’ve seen Tesla go back and add support for Intel vehicles after it initially released a feature for AMD vehicles. We saw this with the weather radar overlay and several other features in the past. However, Tesla has been developing code with web technologies lately. While this makes development easier, it just doesn’t perform as well on the slower Intel hardware, causing it to be left out. We saw this with the new Dashcam Viewer, which is entirely coded in HTML, CSS, and JS. The new viewer was available on HW3 and HW4 vehicles, but only those that included the Ryzen infotainment processor.
Grok is coming to Tesla vehicles very soon. Next week at the latest.
There’s a lot we’re expecting in Grok for Teslas. Some people will absolutely love it because it’ll completely transform their drives from a singular experience to feeling like they have a knowledgeable person sitting right next to them. Given the recent controversies surrounding Grok, some people will strongly oppose it. Hopefully, Tesla makes it easy for those users to turn off Grok.
The voice command system, which is activated through the steering wheel, is expected to be replaced with Grok. This will mean that you’ll be able to talk to your vehicle much more naturally, rather than having to remember specific syntax and commands, which should be a major improvement.
We’re personally looking forward to just being able to ask questions that pop into our heads while driving, such as What’s the date of Tesla’s next event, or How many miles away is Mars? Knowledge will be available at the touch of a finger and more accessible than ever.
Grok is also expected to support continuous conversations, meaning that you’ll be able to hold a conversation with it and go back and forth about a certain topic. While there are hints of a wake word in the code, for now, it seems like you’ll press the steering wheel button once to activate it, and then again to turn it off.
For those excited about AI and Grok, this will be one of the biggest additions to Tesla’s software in years, possibly only rivaled by the Dashcam / Sentry Mode feature and FSD Beta.
It shouldn’t be long now before we all have a chance to try it out for ourselves.




















![Tesla Updates Robotaxi App: Adds Adjustable Pick Up Locations, Shows Wait Time and More [VIDEO]](https://www.notateslaapp.com/img/containers/article_images/tesla-app/robotaxi-app/25-7-0/robotaxi-app-25.7.0.webp/4ac9ed40be870cfcf6e851fce21c43b9/robotaxi-app-25.7.0.jpg)













