Version 10 of Tesla's FSD Beta landed this past Saturday and it has shown incremental improvements over the previous beta from just a few weeks ago. It's now driving smoother and more confident than it has in the past, especially in more complicated scenarios such as roundabouts and taking unprotected left turns.
We're a few weeks away from the next beta, which is sure to be an exciting one for many. It's the one that we've been looking forward to for quite some time. Beta 10.1 is the one that should be stable enough for Tesla to release it to a wider audience.
v10.1 Release
Beta 10.1 is scheduled to be released on October 1st at midnight if everything stays on schedule. If so, we'll soon have the long-waited button to opt-in to the 10.1 beta. Elon Musk already talked a little about how Tesla will release the beta to additional users. It'll be a gradual process, so not everyone who wants the beta will be able to get it initially.
Wider Release
Soon owners will be able to tap a ‘Download FSD Beta' button to opt-in to the FSD Beta. It's not clear whether the capability to show this button is already available in current software and Tesla just needs to enable it via a configuration or whether it will require a new software update. The original plan back in April was for Tesla to add the button to the Service menu in the car, or maybe adding it to the Software section makes more sense since we already have the ability to be on the stable or advanced track there.
Highway and City NNs Merged
With the 10.1 release Tesla is also set to merge Autopilot code for city streets and highways so that Tesla has a single stack for FSD. So far, Navigate on Autopilot on the FSD betas has utilized the same stack as production vehicles. Navigate on Autopilot on the highways is already fairly good, but we may see it get even better with this release.
One of my gripes on the highway is that the car will often go too fast around a sharp curve and go slightly toward the outer edge of the curve instead of taking the curve a little tighter. If you're taking one of these curves with a neighboring car, it can definitely be a little gut wrenching and I'll usually take off if the curve is sharp enough.
We'll hopefully see these kinds of issues improved when Tesla applies the new neural net to highway driving.
Ability to Move Backward
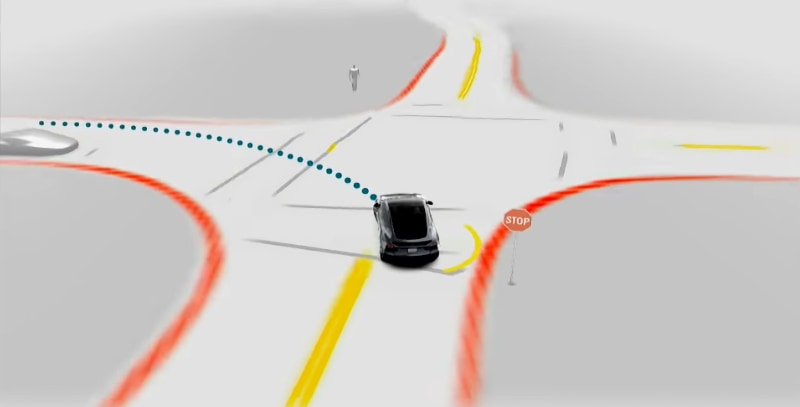
An additional feature that's expected in version 10.1 is the ability for the car to move backwards. For example, if the car is stopped at an intersection and doesn't have great visibility, it'll now creep forward for a better view, just like a human driver would. But with 10.1, the car will actually move backwards after creeping forward if it notices a car is coming. We're absolutely inching toward autonomy here.
Tesla is building an impressive system and we may all get to try it soon. Version 10.1 is set to drop in just 15 days.
With 10.1, it will creep forward with more confidence & quickly reverse back a little (just as a person would) if it sees danger
Following the successful launch of Robotaxi on Sunday, June 22nd, Tesla has begun moving to the next phase of its Robotaxi rollout. They have finally begun sending out a second, larger wave of invites, expanding the early access program to more members of the Tesla community across the United States.
This has moved them past the initial 20 or so users that were offered access on Sunday. That also means Tesla is on the hunt for something crucial: more real-world data.
More Riders ASAP
The initial launch was a tightly controlled event, with access granted to a small and curated group of influencers. While this approach was ideal for generating initial buzz for the launch and collecting feedback from high-quality testers, it also presented logistical challenges.
With only a handful of authorized riders and vehicles, the demand for rides would inevitably dry up as influencers begin their journeys back home. Without a public release, that would leave Tesla’s Robotaxi fleet idle, unable to gather additional data.
To rapidly improve on Robotaxi’s FSD, Tesla needs its vehicles to be constantly navigating real-world scenarios, encountering edge cases, and logging miles. The second round of invites is needed to keep Robotaxis learning and on the road.
Austin Users Next?
This new wave of invites isn’t an open door for members of the public quite yet. By continuing to send invites to trusted community members, Tesla is executing a slow and deliberate rollout by inviting members who know and love Tesla. This allows them to scale the program gradually, increasing the number of users and the diversity of ride requests without overwhelming the relatively small initial fleet of about 10 cars.
Future phases will likely involve opening access to Tesla owners within Austin, which would open up a regular flow of rides. Once that’s done, Robotaxi will likely open up to the public.
Sign of Confidence
The expansion of the early access program is a sign that Tesla is happy and confident with the rollout so far. While Tesla can gather plenty of data around Austin from Tesla owners using FSD, they also need to continue testing features that are exclusive to the Robotaxi, such as the Robotaxi app, support, and remotely control the vehicles when needed.
We expect a full launch to potentially still be months out, but this methodical expansion will likely see more users gradually gain access to the Robotaxi network in the coming weeks.
Omead Afshar, who was previously Elon Musk’s “Fixer” and the Head of Operations for North America and Europe, has left the company, according to reports from Forbes and Bloomberg.
While some sources have claimed he was fired, others say he voluntarily left, but his exit isn’t exactly an isolated event.
Afshar’s departure is the second high-level exit this month, following Optimus' lead, Milan Kovac. When viewed together, alongside Elon's full-time return to Tesla, these changes may offer some insight into the pressures the Tesla executive team is facing during a transitional period.
Transition from what, you may ask? Well, from the world’s largest EV company to an AI and robotics-first company. This transition has been looming for years, and with Elon’s vision of a future powered by autonomous vehicles and humanoid robots. It’s the path that Tesla is determined to forge, ahead of anyone else, and despite the immense challenges of real-world AI.
Two Competing Narratives
Two primary theories have emerged to explain the timing of Afshar’s exit, and each paints quite a different picture.
The first, supported by the reporting from Forbes, frames him as a casualty of Tesla’s current sales issues. With sales having declined for five consecutive months in Europe and dropping in the US, the second quarter of 2025 has been rough for Tesla. In conjunction with recent factory shutdowns, a lot is happening behind the scenes, with Robotaxi taking the limelight and the missing Affordable Model in the backseat. Afshar’s departure could be the result of a move to show accountability for the performance drop of the core business he managed.
The second narrative is one of “mission accomplished.” Just days before his abrupt exit, Afshar posted a celebratory message on X about the successful launch of the Robotaxi Network.
Absolutely historic day for Tesla.
This has been years of hard work and focus by so many people within the company.
He followed up with a second celebratory-styled message the day after - it was a project he was deeply involved in as the do-it-all executive for Elon. This has led to speculation that his departure was planned, and potentially tied to compensation vesting with the launch of the Robotaxi Network, allowing him to leave on a high note after seeing the kick-off of one of Tesla’s most critical projects. This follows other recent departures of Tesla’s executive team, many of whom have gone to full-time retirement following years of hard work.
The Bigger Picture: What Is Tesla, really?
While both theories are plausible, the truth may be that Afshar’s departure is the symptom of a much larger challenge. Tesla is balancing two very different corporate identities.
On one hand, it's a manufacturing and sales powerhouse, responsible for the world’s best-selling electric vehicles, a business facing intense competition and brand perception challenges that even Elon has acknowledged.
On the other hand, Tesla is the only company shipping real-world AI for consumers, and betting its future on robotics and AI with massive investments in capacity for both future businesses.
The recent executive churn suggests that this balancing act is creating some strain, especially for Tesla’s senior executives. The departure of Milan Kovac signaled pressure on the future side of the business, where progress has been slow but consistent. Now, the exit of Afshar, who ran the “legacy” automotive side of the business, shows there’s pressure there, as the automotive business navigates a period of flattening growth and intense global competition.
So, we ask again - What is Tesla, really? Is it an AI and Robotics company? Kind of, but not really. Is it an EV company? Once again, kind of.
In our eyes, it is no longer just an EV company, but it’s at a critical point where it is transitioning to an AI and robotics company.
Tesla’s messaging to the outside world is similarly conflicted. On the one hand, the launch of the refreshed Model Y, a massive boost for the business, went seemingly unnoticed by Elon, who only posted a single update on the Model Y after its launch. On the other hand, we’ve seen consistent and non-stop posts about Robotaxi, which is likely years away from generating a significant portion of Tesla’s profits.
A Company in Transition
Ultimately, Omead Afshar’s departure is more than a single personnel change; it’s a reflection of Tesla navigating a crucial and challenging transition. The evidence of an abrupt halt, with internal sources reporting his account has been removed from internal company directories, suggests that there’s more to this than meets the eye.
Whether he was fired for declining sales or chose to leave after the successful launch of the Robotaxi Network, the outcome is the same. A key leader, tasked with managing the core business of the present, is gone at the very moment when the company is changing its path towards AI and robotics.
Being both a car company in a tough market and an AI company on the verge of a breakthrough is a monumental challenge, and the path forward is likely to see even more changes.




















![First Recorded Tesla Robotaxi Intervention: UPS Truck Encounter [VIDEO]](https://www.notateslaapp.com/img/containers/article_images/2025/robotaxi_model_y.jpg/3036d8b53214c2d071c978c42911e451/robotaxi_model_y.jpg)
![First Look at Tesla's Robotaxi App and Its Features [PHOTOS]](https://www.notateslaapp.com/img/containers/article_images/tesla-app/robotaxi-app/robotaxi-app-tips.webp/e643a61975bf712d18dc9aa9a48fdb01/robotaxi-app-tips.jpg)
![Tesla’s New Camera Cleaning Feature and the Future of Cleaning Robotaxis [VIDEO]](https://www.notateslaapp.com/img/containers/article_images/2024/windshield-rain-droplets.jpg/8335f3020509dab3cdb56c1a91d054a9/windshield-rain-droplets.jpg)
![Tesla Launches Robotaxi: Features, Robotaxi App, Command Center and First Impressions [VIDEO]](https://www.notateslaapp.com/img/containers/article_images/2025/robotaxi_rear_screen.jpg/bf5ea088bdebda8ca7e0aa1503b69f4e/robotaxi_rear_screen.jpg)