Tesla will now alert you when vision-monitoring isn't being used
@WifeDirtyTesla
With FSD V12.4.1 finally beginning its rollout to select customers as of last night. You’re probably wondering exactly how nags will – or won’t – work for the updated and much-hyped update.
No Steering Wheel Nags
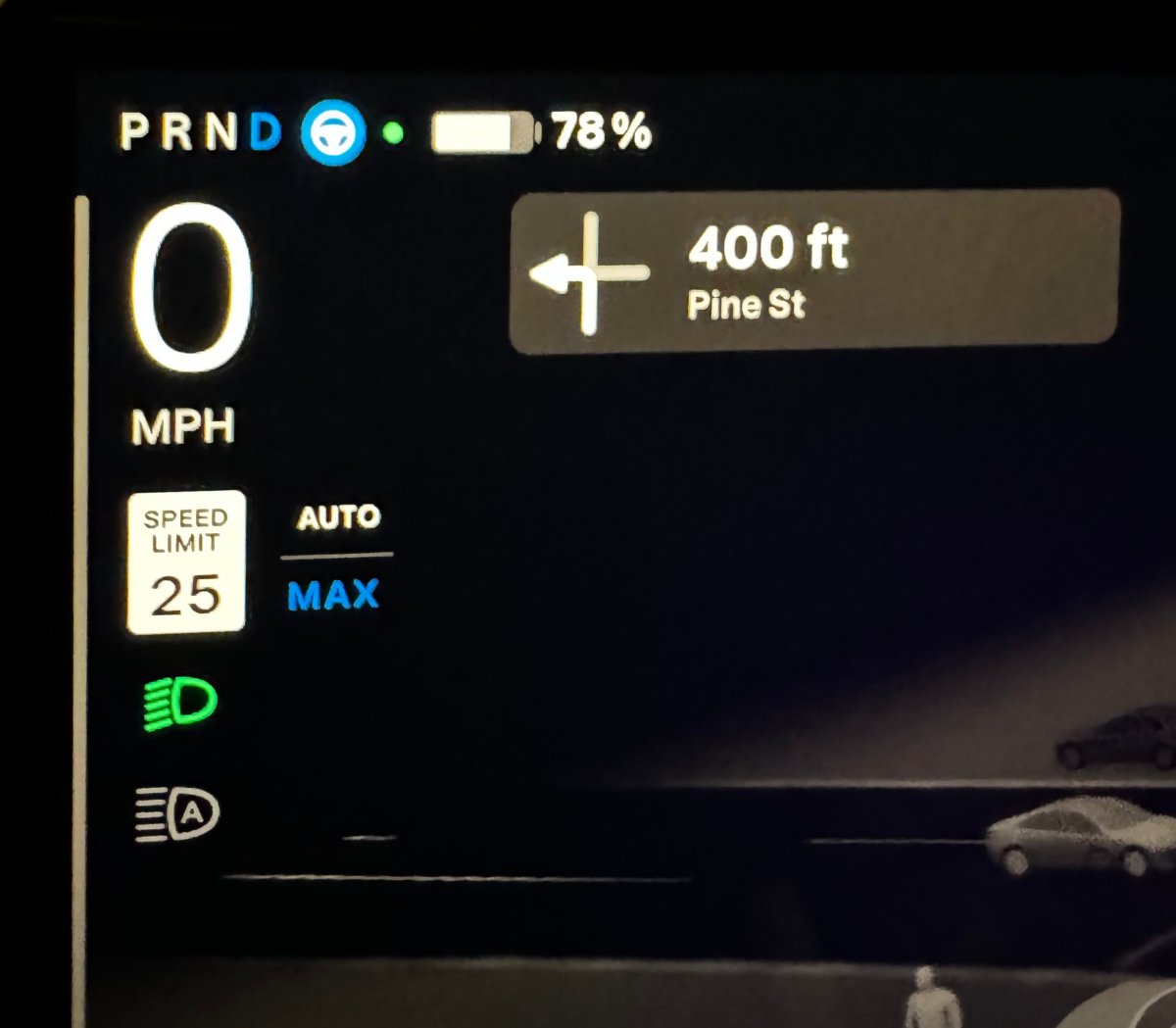
Tesla’s current implementation of no steering wheel nags on V12.4.1 is pretty simple and straightforward. As long as you’re paying attention and looking at the road, you won’t be required to touch the steering wheel. You’ll see a green dot on the screen, letting you know that the enhanced driver monitoring system (DMS) and Vision-Based Attention Monitoring (VBAM) are active.
On the Model S and X, the green dot is on the instrument cluster screen, immediately next to the blue FSD/AP wheel icon. On the Model 3 and Model Y (and Cybertruck, in the future), the green dot indicator is on the top left of the screen, in between the battery indicator and the blue FSD/AP wheel.
However, there are some restrictions baked into this initial implementation. Your eyes cannot be obscured or occluded from the cabin camera. This means that legacy vehicles are ineligible for the new VBAM, along with anyone who installs a physical camera cover for privacy or other reasons.
For the privacy-conscious folks, Tesla has mentioned that cabin camera imagery will not leave the vehicle itself unless you enable data sharing, which is optional. Cabin camera imagery is also not available to view via the API, so third-party integrations cannot view your cabin camera either.
The green dot on the center display
Whole Mars Catalog
Restrictions
There are some other catches too. The cabin camera is currently unable to see through sunglasses due to the polarization. The car will display “Attention monitoring unavailable, sunglasses use detected” on the screen. This could change in the future as Tesla figures out how to best take advantage of its cabin cameras. However, it can see through regular glasses just fine – so eyeglass wearers, rejoice!
Attention monitoring unavailable, sunglasses use detected
Vehicles that do not have IR lights in the cabin will also not be able to take advantage of VBAM at night – as the cameras in vehicles without IR lights are unable to see at night. Tesla does offer a refit for vehicles to upgrade to IR-capable cameras – put in a service ticket if you’re interested through the Service Menu on the app.
If it cannot find your eyes due to any of these restrictions, the green light will not come on, and the regular wheel nags that you are used to will continue.
Warnings and Suspensions
If VBAM determines that you’re not paying attention – initially a screen warning will appear, telling you to pay attention to the road. This can be dismissed quickly by just reverting your attention to the road ahead of you. You won’t have to touch the steering wheel to dismiss the nag.
However, if you continue to not pay attention and the DMS detects improper usage, you will receive an Autopilot Strikeout, and FSD will disengage. Before a Strikeout occurs, there will be multiple auditory and visual warnings, ensuring you have a few moments to bring your attention back to supervising FSD.
You can receive up to 5 Strikeouts before the FSD becomes suspended. One strikeout will be lifted per 7-day period in which you do not receive a Strikeout. If you hit 5 Strikeouts, it could be up to 5 weeks before you clear all of them! If you receive another Strikeout within that 7-day period after an initial Strikeout, the 7-day period is reset.
Other Changes
Elon Musk has mentioned that V12.4 was supposed to be focused on user comfort, by reducing hard acceleration and braking. According to Musk, it should have a 5-10x improvement between user disengagements.
Early Access owners have mentioned that 12.4 tends to be more assertive and less hesitant when it comes to intersections, stop signs, and parking lots. Owners have also noticed improvements in the “lane dancing”, where FSD V12.3 would stray in between lanes for too long while changing lanes.
Of additional note is that Vision Autopark is slightly faster – but this is the same Vision Autopark speed increase that rolled out to customers who have already received the Spring Update. For everyone else, expect a 2-3x improvement in how fast Vision Autopark changes directions, and how fast it maneuvers in general. As of the Spring Update, it can now park in even tighter spaces.
Sadly, some previously announced features were missed out on in this release of FSD V12.4.1. Namely, the key features of Banish Autopark and Park Seek. For the time being, users will still have to disengage FSD and then engage Autopark once they find their parking spot.
Banish Autopark, or “Reverse Summon” was thought to arrive in V12.4 as part of the comfort update according, allowing you to choose a parking spot type preference, exit the vehicle, and then have the car park itself.
Additionally, Park Seek – which would allow FSD to automatically find a parking spot in a parking lot, and then engage Autopark automatically, was initially a confirmed feature, but is not present in this release.
Finally, Hand Gesture recognition was supposed to come in an update “later in May” – but given that FSD V12.4 has missed previous deadlines – no surprise to people familiar with the “2 week policy” – there is no confirmation yet if that feature has made it into this build. It is very possible that the employee in question may have been referring to V12.5 – which is also expected to bring vehicle-to-fleet communication.
Given that it just rolled out to employees yesterday, and then to “OG” FSD Beta owners today, we could expect 2024.15.5 – the version that contains V12.4.1 – to hopefully continue rolling out to customers next week. Everyone with an update under 2024.15.5 - so users on 2024.3.25, 2024.8.9, and 2024.14.11 – should be eligible to receive this update. The very few vehicles already on 2024.20 with the Adaptive Headlights functionality will have to wait a bit longer!
Subscribe
Subscribe to our newsletter to stay up to date on the latest Tesla news, upcoming features and software updates.
Following the successful launch of Robotaxi on Sunday, June 22nd, Tesla has begun moving to the next phase of its Robotaxi rollout. They have finally begun sending out a second, larger wave of invites, expanding the early access program to more members of the Tesla community across the United States.
This has moved them past the initial 20 or so users that were offered access on Sunday. That also means Tesla is on the hunt for something crucial: more real-world data.
More Riders ASAP
The initial launch was a tightly controlled event, with access granted to a small and curated group of influencers. While this approach was ideal for generating initial buzz for the launch and collecting feedback from high-quality testers, it also presented logistical challenges.
With only a handful of authorized riders and vehicles, the demand for rides would inevitably dry up as influencers begin their journeys back home. Without a public release, that would leave Tesla’s Robotaxi fleet idle, unable to gather additional data.
To rapidly improve on Robotaxi’s FSD, Tesla needs its vehicles to be constantly navigating real-world scenarios, encountering edge cases, and logging miles. The second round of invites is needed to keep Robotaxis learning and on the road.
Austin Users Next?
This new wave of invites isn’t an open door for members of the public quite yet. By continuing to send invites to trusted community members, Tesla is executing a slow and deliberate rollout by inviting members who know and love Tesla. This allows them to scale the program gradually, increasing the number of users and the diversity of ride requests without overwhelming the relatively small initial fleet of about 10 cars.
Future phases will likely involve opening access to Tesla owners within Austin, which would open up a regular flow of rides. Once that’s done, Robotaxi will likely open up to the public.
Sign of Confidence
The expansion of the early access program is a sign that Tesla is happy and confident with the rollout so far. While Tesla can gather plenty of data around Austin from Tesla owners using FSD, they also need to continue testing features that are exclusive to the Robotaxi, such as the Robotaxi app, support, and remotely control the vehicles when needed.
We expect a full launch to potentially still be months out, but this methodical expansion will likely see more users gradually gain access to the Robotaxi network in the coming weeks.
Omead Afshar, who was previously Elon Musk’s “Fixer” and the Head of Operations for North America and Europe, has left the company, according to reports from Forbes and Bloomberg.
While some sources have claimed he was fired, others say he voluntarily left, but his exit isn’t exactly an isolated event.
Afshar’s departure is the second high-level exit this month, following Optimus' lead, Milan Kovac. When viewed together, alongside Elon's full-time return to Tesla, these changes may offer some insight into the pressures the Tesla executive team is facing during a transitional period.
Transition from what, you may ask? Well, from the world’s largest EV company to an AI and robotics-first company. This transition has been looming for years, and with Elon’s vision of a future powered by autonomous vehicles and humanoid robots. It’s the path that Tesla is determined to forge, ahead of anyone else, and despite the immense challenges of real-world AI.
Two Competing Narratives
Two primary theories have emerged to explain the timing of Afshar’s exit, and each paints quite a different picture.
The first, supported by the reporting from Forbes, frames him as a casualty of Tesla’s current sales issues. With sales having declined for five consecutive months in Europe and dropping in the US, the second quarter of 2025 has been rough for Tesla. In conjunction with recent factory shutdowns, a lot is happening behind the scenes, with Robotaxi taking the limelight and the missing Affordable Model in the backseat. Afshar’s departure could be the result of a move to show accountability for the performance drop of the core business he managed.
The second narrative is one of “mission accomplished.” Just days before his abrupt exit, Afshar posted a celebratory message on X about the successful launch of the Robotaxi Network.
Absolutely historic day for Tesla.
This has been years of hard work and focus by so many people within the company.
He followed up with a second celebratory-styled message the day after - it was a project he was deeply involved in as the do-it-all executive for Elon. This has led to speculation that his departure was planned, and potentially tied to compensation vesting with the launch of the Robotaxi Network, allowing him to leave on a high note after seeing the kick-off of one of Tesla’s most critical projects. This follows other recent departures of Tesla’s executive team, many of whom have gone to full-time retirement following years of hard work.
The Bigger Picture: What Is Tesla, really?
While both theories are plausible, the truth may be that Afshar’s departure is the symptom of a much larger challenge. Tesla is balancing two very different corporate identities.
On one hand, it's a manufacturing and sales powerhouse, responsible for the world’s best-selling electric vehicles, a business facing intense competition and brand perception challenges that even Elon has acknowledged.
On the other hand, Tesla is the only company shipping real-world AI for consumers, and betting its future on robotics and AI with massive investments in capacity for both future businesses.
The recent executive churn suggests that this balancing act is creating some strain, especially for Tesla’s senior executives. The departure of Milan Kovac signaled pressure on the future side of the business, where progress has been slow but consistent. Now, the exit of Afshar, who ran the “legacy” automotive side of the business, shows there’s pressure there, as the automotive business navigates a period of flattening growth and intense global competition.
So, we ask again - What is Tesla, really? Is it an AI and Robotics company? Kind of, but not really. Is it an EV company? Once again, kind of.
In our eyes, it is no longer just an EV company, but it’s at a critical point where it is transitioning to an AI and robotics company.
Tesla’s messaging to the outside world is similarly conflicted. On the one hand, the launch of the refreshed Model Y, a massive boost for the business, went seemingly unnoticed by Elon, who only posted a single update on the Model Y after its launch. On the other hand, we’ve seen consistent and non-stop posts about Robotaxi, which is likely years away from generating a significant portion of Tesla’s profits.
A Company in Transition
Ultimately, Omead Afshar’s departure is more than a single personnel change; it’s a reflection of Tesla navigating a crucial and challenging transition. The evidence of an abrupt halt, with internal sources reporting his account has been removed from internal company directories, suggests that there’s more to this than meets the eye.
Whether he was fired for declining sales or chose to leave after the successful launch of the Robotaxi Network, the outcome is the same. A key leader, tasked with managing the core business of the present, is gone at the very moment when the company is changing its path towards AI and robotics.
Being both a car company in a tough market and an AI company on the verge of a breakthrough is a monumental challenge, and the path forward is likely to see even more changes.


















_300w.png)

![First Recorded Tesla Robotaxi Intervention: UPS Truck Encounter [VIDEO]](https://www.notateslaapp.com/img/containers/article_images/2025/robotaxi_model_y.jpg/3036d8b53214c2d071c978c42911e451/robotaxi_model_y.jpg)
![First Look at Tesla's Robotaxi App and Its Features [PHOTOS]](https://www.notateslaapp.com/img/containers/article_images/tesla-app/robotaxi-app/robotaxi-app-tips.webp/e643a61975bf712d18dc9aa9a48fdb01/robotaxi-app-tips.jpg)
![Tesla’s New Camera Cleaning Feature and the Future of Cleaning Robotaxis [VIDEO]](https://www.notateslaapp.com/img/containers/article_images/2024/windshield-rain-droplets.jpg/8335f3020509dab3cdb56c1a91d054a9/windshield-rain-droplets.jpg)
![Tesla Launches Robotaxi: Features, Robotaxi App, Command Center and First Impressions [VIDEO]](https://www.notateslaapp.com/img/containers/article_images/2025/robotaxi_rear_screen.jpg/bf5ea088bdebda8ca7e0aa1503b69f4e/robotaxi_rear_screen.jpg)



![Elon talks about Twitter and job cuts at Bloomberg forum [video]](https://www.notateslaapp.com/images/news/2022/elon-musk-qatar-forum_300w.jpg)










