Tesla Auto Wipers: Why They Don't Work and Why There Isn't an Easy Fix








Tesla’s Autowipers have been a long-standing issue for customers, as well as Tesla’s engineers. Elon Musk has often mentioned that improvements to Autowipers have been around the corner for years, but they appear to have taken a rain check.
Tesla owners often complain that their wipers are running against a completely dry windshield on a sunny day, or not running at all in light rain. Moderate to heavy rain performance seems to be improved for the most recent update to Auto Wipers.
In our test, we cover the vehicle's windshield with Post-It notes to find out what the vehicle’s cameras can see.

The Water Problem
Tesla vehicles lack a rain sensor. This is a result of Tesla’s strategy to rely upon Tesla Vision to replace all sensors – which they’ve successfully used most recently to replace the ultrasonic parking sensors (USS) on their vehicles. Tesla believes that vision is the solution to achieving all self-driving capabilities, and this includes the elimination of extraneous sensors such as USS and radar.
Of course, many other vehicles employ simple rain sensors that do function fairly well, and effectively detect the presence of water on the windshield. So, what’s stopping Tesla Vision from doing the same thing?
The problem isn’t Tesla’s detection methods, it’s the view of the windshield Tesla has. Water droplets are small and the three front cameras only capture a small portion of the entire windshield, making it difficult for them to capture and acknowledge the fact that there is water on the windshield that needs to be wiped away. This is in addition to the fact that the cameras are focused further away, to drive and navigate the vehicle effectively, rendering the visuals close to the camera blurry – leaving a rather technical challenge.
Our Test
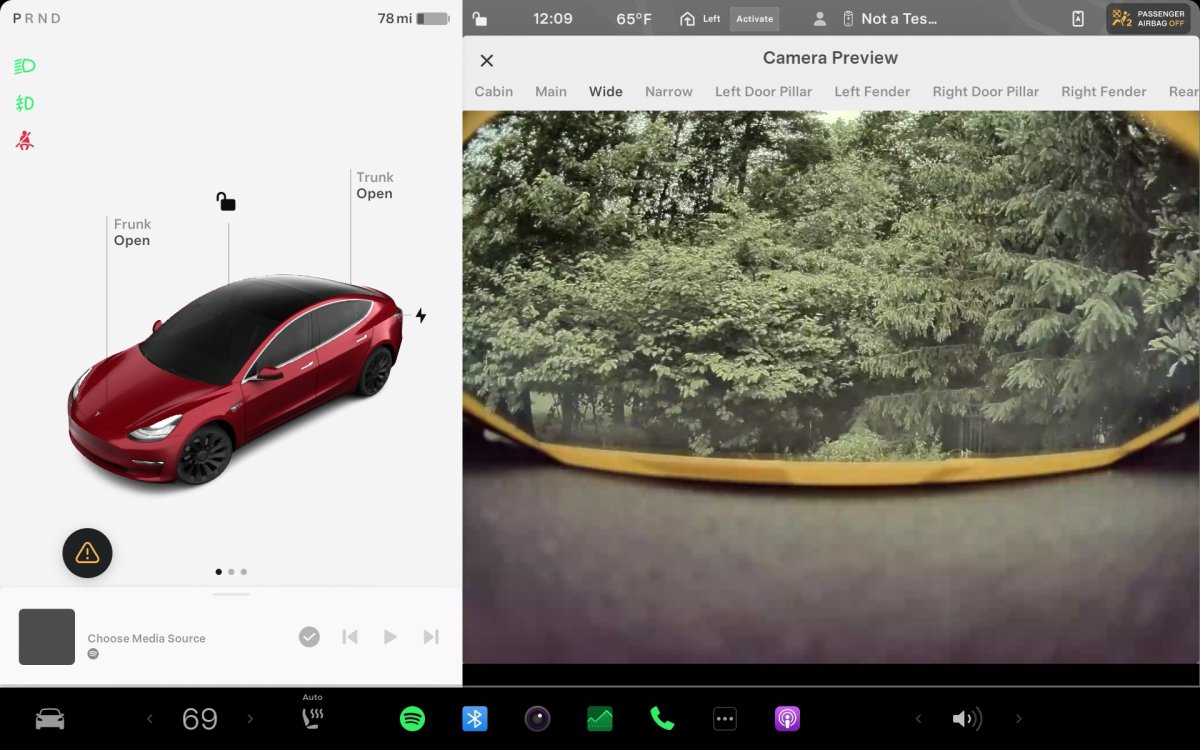
Even Tesla’s front-facing, wide-angle camera can barely see the yellow Post-In notes in our test, let alone the blue Post-It notes spread through the windshield. Tesla’s other front-facing camera, the “main” camera, sees only a trace of the Post-Its along the bottom. In reality, Tesla has no idea what’s on the vehicle's windshield and can only make assumptions based on a few square inches near the top of the windshield. If any rain droplets are on this portion of the windshield, they’ll also be out of focus. If the view of the rain droplets was as clear at the image at the top of this article, Tesla would have perfected auto wipers years ago.
Tesla’s third front-facing camera, the “narrow” view, is only available on hardware 3 and it’s just a zoomed-in version of the main camera, which causes it to miss our Post-It notes completely. With hardware 4, Tesla removed the narrow camera and now determines the narrow view by cropping the main camera, which has a higher resolution in hardware 4.

Tesla’s Engineering Magic
Tesla is able to detect drops on the windshield when they land in front of the camera cluster, but again, since the cluster is mounted high above most of the windshield, this can lead to the windshield filling up with water droplets before a wipe is triggered.
They’ve also tried using the vehicle’s other cameras, such as the repeater or B-pillar cameras to detect falling rain – which can help the Autowiper system build confidence that there is water on the windshield. Once it has enough confidence, it triggers a wipe – or changes the wipe modes. However, in reality, due to the focal length of the cameras, it has a difficult time detecting rain droplets because they’re out of focus.
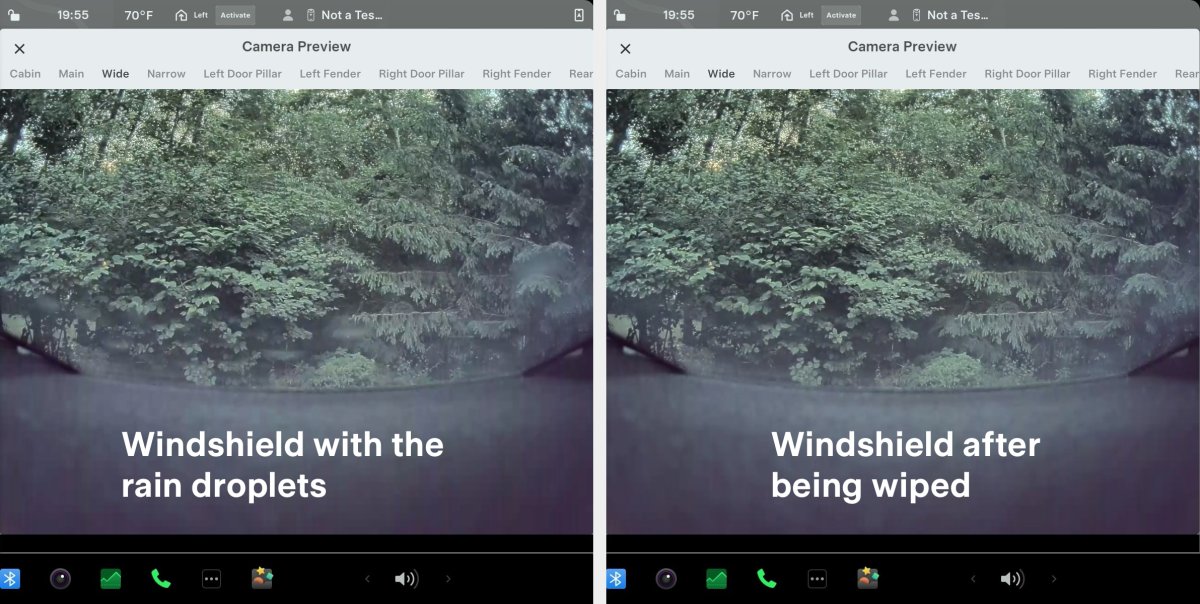
In the image below, taken from Tesla’s wide-angle camera, you can see that the water droplets from the previous image are nearly impossible to detect. On the left, is the windshield with the water droplets, and on the right is the windshield after being wiped. While the droplets cause a slightly blurry image, they’re extremely difficult to see.
Wiping Away Challenges
The transition to entirely vision has left a considerable challenge for Tesla’s very capable engineering teams. The current Autopilot hardware suite lacks a good view of the windshield itself, but it can detect falling rain. Given that Tesla’s software can detect and display other vehicles using turn signals, it is also possible that they could detect other vehicles using wipers or use other cameras to see rain on the vehicle, such as the B-pillar cameras, to increase the system’s confidence that a wipe is required.
However, these solutions are likely to not be perfect, as they don’t provide an accurate representation of what the driver sees in the windshield, but instead an accurate representation of what the vehicle itself can see.
When engaging FSD on a lightly rainy day, your car may drive perfectly, but you’ll have a windshield full of rain when supervising!
Of course, there are many other reasons to run the windshield wipers beyond simple rain – spray and debris from vehicles in front, water falling from trees or being kicked up by deep puddles, or even snow settling on the windshield. Another challenge is bugs – they leave sticky smears at higher speeds when impacting the windshield, causing spots that can impede either vehicle vision or driver vision.
Future Solutions
Tesla likes to avoid solutions that only solve a single problem – such as adding a rain sensor. It is an additional manufacturing complication, adds additional cost to vehicles, and segments Tesla’s vehicles between model years.
On the other hand, cameras have solved many problems over the years – such as Tesla Vision taking over from the USS system that was present on pre-2022 Tesla vehicles. While it did take until FSD V12 for Autopark to become available to vision-only vehicles, the upgraded Vision-based Autopark is a marked improvement over the older USS solution.
Another such problem has been auto-high beams, which were solved with better oncoming vehicle detection and improved AI – which has led to a feature that is much better than its original implementation. This updated implementation has also led to improvements in the use of Matrix headlights – a feature that for now is only available in Europe and China due to legislative issues in the US.
Tesla is most likely going to be pushing another hardware revision – Hardware 5 – in the coming years. Some of the indications of this include the Cybertruck’s bumper camera – which is also expected to arrive in the Model X and Model S in the future.
There is a chance that Tesla may include a forward-facing interior at some point – to solve the fact that Vision is unable to currently see the windshield. However, Tesla also strongly believes they’ll achieve level 4 or 5 of vehicle autonomy in the future, so they could also be banking on autonomy removing the need for good auto wipers.
A Personal Example
If you get into your Tesla on a rainy day or add some drizzle via a watering jug, you can see how Tesla’s Autowipers will not activate unless water is placed directly in front of the camera cluster. You can also spray some water onto the camera housing and take a seat inside and use the camera preview to view what the cameras can see. It’ll provide you with a blurry, limited view of what the cameras see.
We may see further software improvements, but it may be a difficult engineering problem to solve with the limited camera capabilities that currently exist on hardware 3 and hardware 4 vehicles.











![Tesla Autonomously Delivers Its First Vehicle to Customer — And It’s More Impressive Than Expected [VIDEO]](https://www.notateslaapp.com/img/containers/article_images/model-y-2025/newmodely_77.jpg/382e0312c769d0bb2e1234f7ac556fad/newmodely_77.jpg)