The improvements in v12.5 are supposed to focus on rarer, more complex situations and vehicle-to-fleet communication. Tesla’s Autopilot lead, Ashok Elluswamy, also mentioned that FSD would gain the ability to go in reverse around this time.
Merge City & Highway Stacks
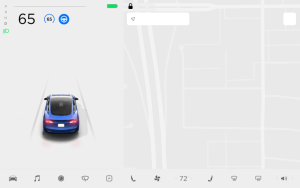
FSD v12 has been a multi-stack setup so far, with a city-streets stack that is end-to-end, and an older highway stack that was carried over from v11. FSD v12.5 will once again merge the city/highway stacks according to Musk, who confirmed the feature yesterday. That means that there will no longer be an implicit highway stack.
This could cause some regressions during highway driving, similar to the ones we experienced when Tesla first merged highway and city stacks back in FSD v11. Ultimately, when the issues were ironed out, we ended up with a smoother and better Autopilot experience on the highway. When FSD v12.5 rolls around, we may see some similar issues but expect FSD v12.5 to do to highways what v12 did for city driving.
Vehicle-to-Fleet Communications
Tesla’s FSD relies heavily upon maps, with the mapping information designating routing and lane changes. When vehicles encounter difficulties, they are unable to communicate that back to the rest of the fleet. This results in every vehicle encountering the same problem. With FSD V12.5, vehicles will be able to communicate road closures or other obstacles back to the rest of the fleet in real-time. This will turn FSD into software that’s constantly improving as the fleet gathers more data, instead of having to wait for a software update.
Cybertruck Finally Gets FSD
In a recent post on X, Musk also confirmed that V12.5 will finally bring FSD to the Cybertruck. Currently, all Cybertrucks only have access to Traffic Aware Cruise Control (TACC). Autopilot and FSD capabilities should arrive alongside all the other features.
Actually Smart Summon
Musk has talked quite a bit about Actually Smart Summon. With FSD 12.5, the new vision-based summon may finally be released. This will introduce Smart Summon capabilities to vision-only cars for the first time. However, it’s expected to be a drastic improvement for all vehicles in similar ways to the new Autopark. The new summon has been tied to the ability to move the vehicle in reverse by Tesla’s Autopilot lead, so expect either both of them to arrive in FSD 12.5, or be held off for a later release.
Release Date
Musk originally mentioned that FSD V12.5 would be released in late June, however, there were several delays with FSD 12.4 and that time frame has now come and gone. FSD 12.4 was initially released in May 2024, but it went through several lengthy revisions before it was introduced to public testers. Going by that time frame, it appears that FSD 12.5 was expected to be released about 4-6 weeks after FSD 12.4. If FSD 12.4.3 is finally got a good spot, we could see FSD 12.5 become available in the next 4-6 weeks or about late August.
Subscribe
Subscribe to our newsletter to stay up to date on the latest Tesla news, upcoming features and software updates.
Tesla has officially announced the next major software update, 2025.26. As expected, this update will introduce the Grok AI assistant to Tesla vehicles, although it’ll initially be limited to the U.S.
Tesla also announced several other features that will arrive in update 2025.26, such as Light Sync, the ability to create and save audio presets, and others.
We’ll break down each new feature and which models and regions we expect it to be available in.
As expected, Grok will only be available on AMD Ryzen-based vehicles. Tesla says that it will also be limited to the United States and require Premium Connectivity, but it looks like it won’t require a subscription to anything else, such as Super Grok.
Unfortunately, Tesla announced that Grok will not be able to control elements in your vehicle and that the old voice command system will still be used to do that.
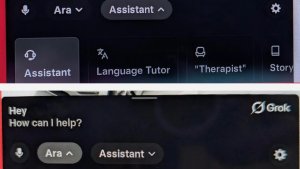
In a post on X, Tesla showed off Grok in action for the first time, showing the interaction between the driver and Grok. The Grok interface displays sound waves in rainbow-like colors when it’s speaking, much like another popular device. Tesla’s video of Grok is below:
Supported vehicles: Based on Tesla’s post, this is expected to include all AMD vehicles, including the Model S, X, 3, Y, and Cybertruck.
Supported regions: U.S.
Light Sync
Not a Tesla App
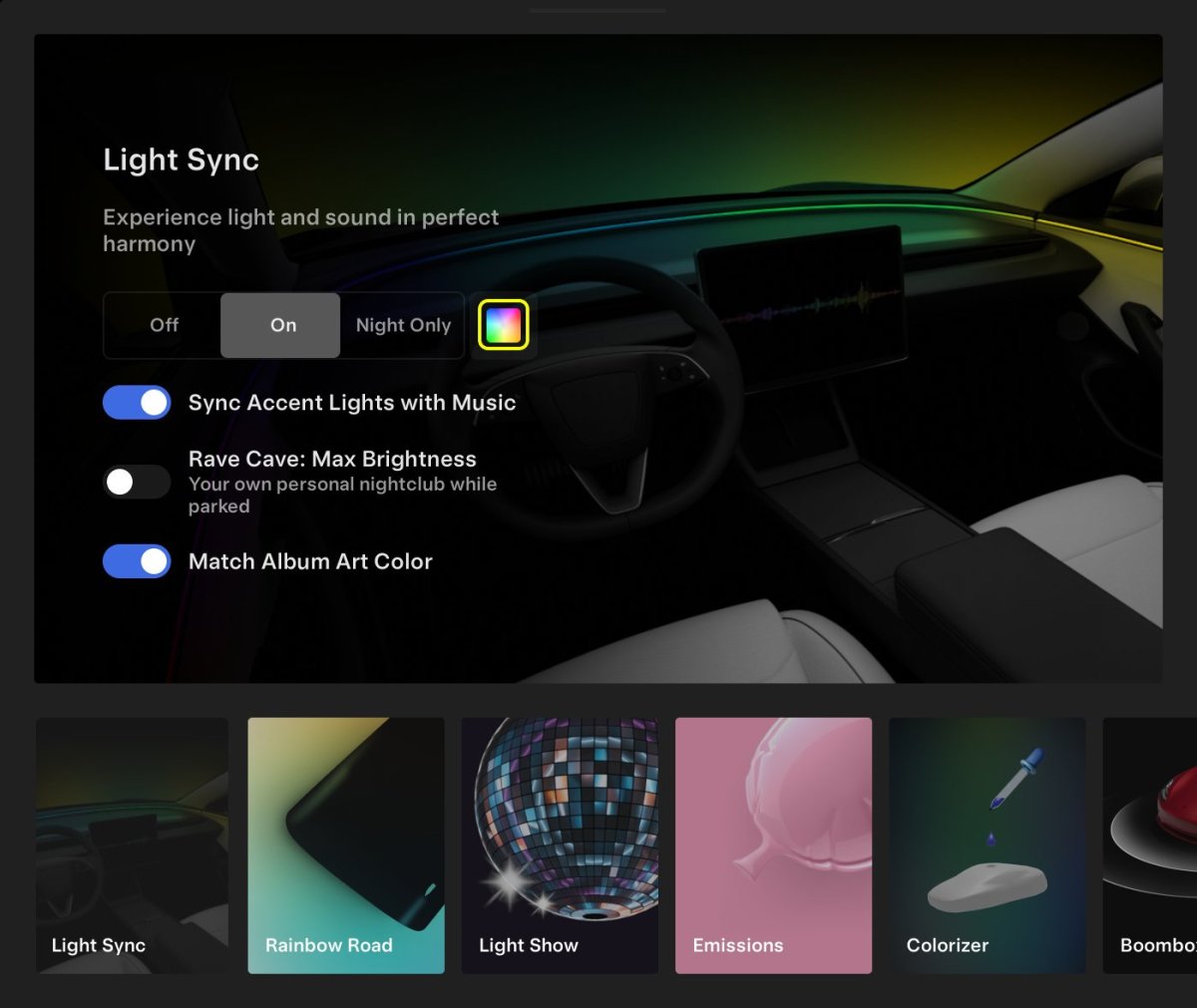
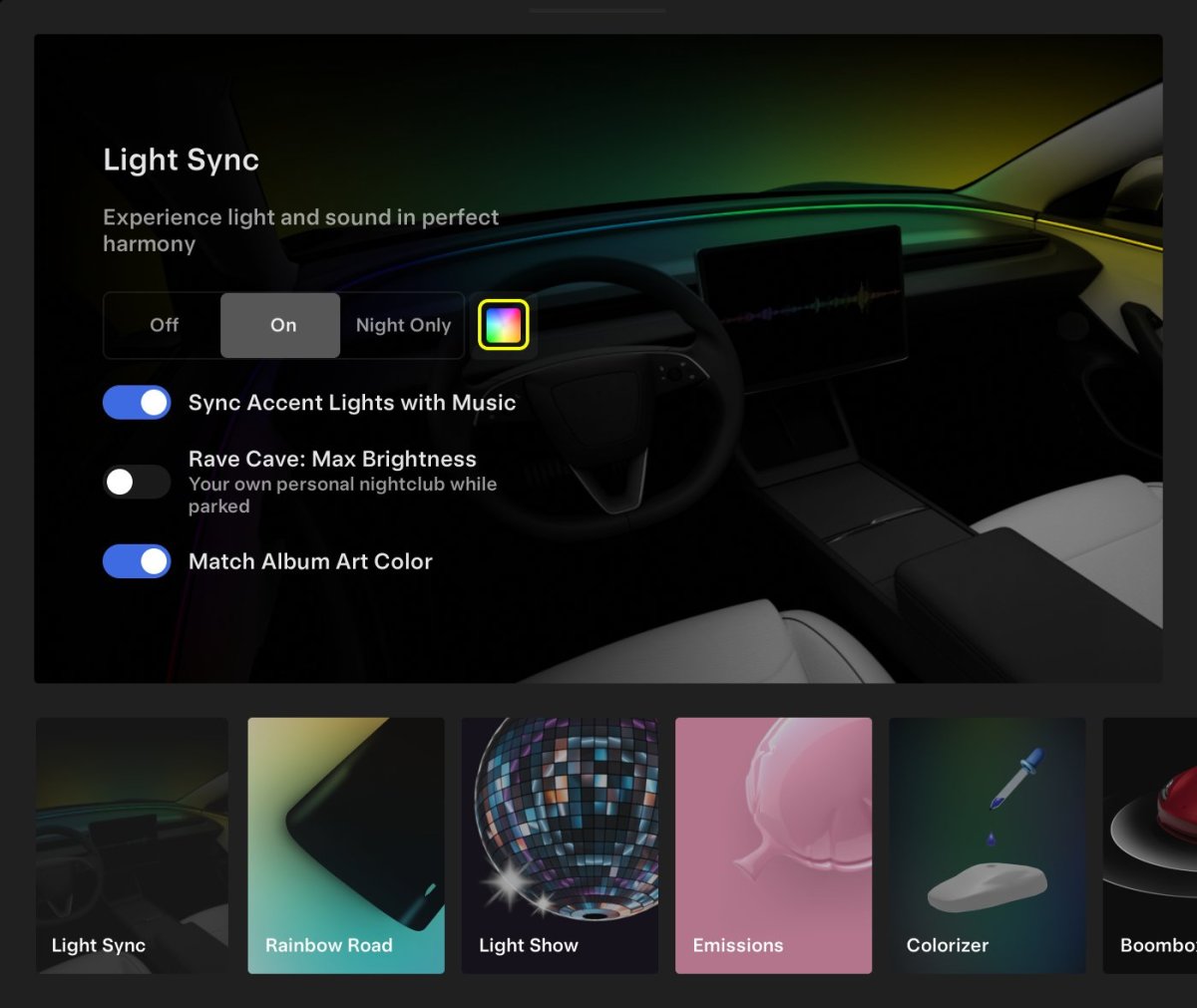
Tesla continues to improve the ambient light feature in Teslas by integrating it into more things. Tesla recently started using the ambient lights during Santa Mode and Rainbow Road. They also turn the ambient lighting red when you’re in Service Mode. However, this time, they’re going one step further. The ambient lights can now react to the music you’re playing by presumably changing colors based on the beat.
You’ll also have the option to maximize the brightness of the ambient lights when this feature is enabled, but only when the vehicle is parked, which Tesla is calling Rave Cave.
In addition to reacting to the music, the lights can change color to match the album color of the music being played, which is kind of similar to the ambient lights on some TVs matching the content being displayed. A needless addition? Sure. But very cool as well.
Tesla shows a screenshot of this feature, which is included in the Toybox app, and shows that you can enable or disable each feature individually, including syncing the lights to music, max brightness, and matching the album artwork color.
Supported vehicles: All vehicles with the ambient lighting feature, including the Cybertruck.
Supported regions: Assumed to be available everywhere.
Audio Settings Update
Not a Tesla App
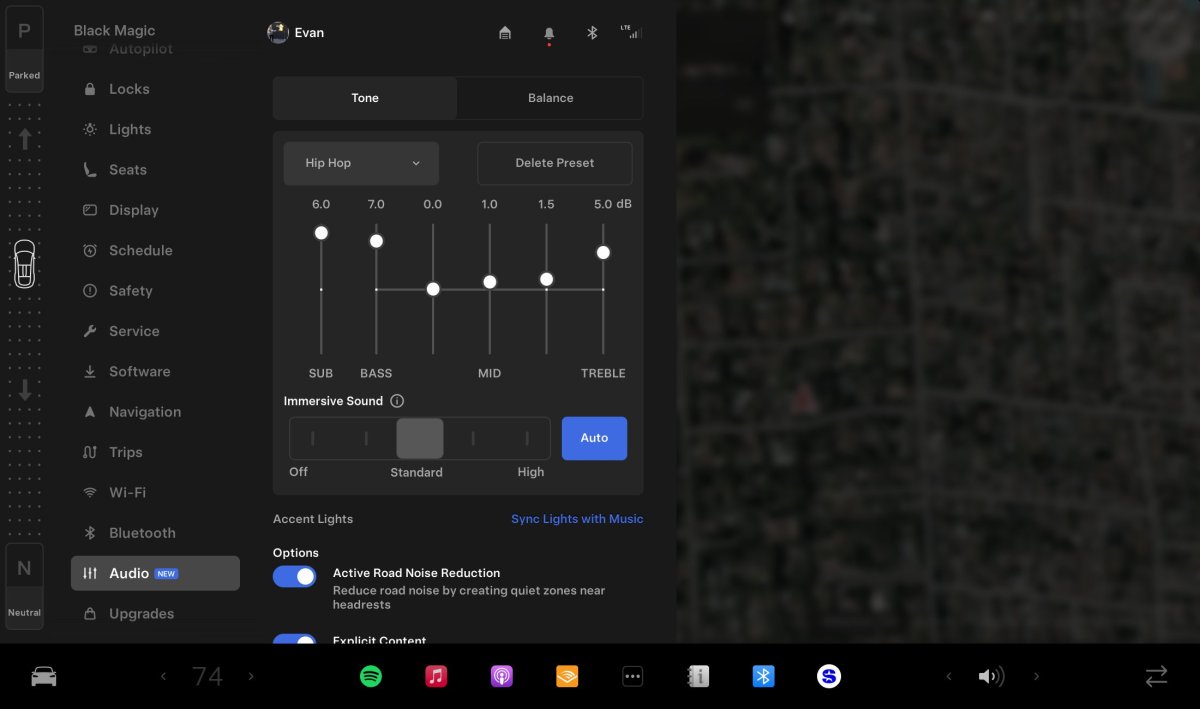
Another feature Tesla highlights is the ability to create presets for audio settings. These audio settings will be in a new Audio tab in the vehicle’s settings, and they’ll allow you to create and save presets for different types of music. For example, you can have a preset for spoken content and another one for pop music.
Each preset will let you adjust the equalizer and set the immersive sound level.
What’s nice here is that it seems that Tesla has redesigned the audio settings and moved them to the main vehicle controls instead of only having them accessible through a button in the music player. You can see the Balance tab at the top, although it doesn’t look like you’ll be able to save the balance as part of the preset.
Supported vehicles: This is expected to be available on all vehicles, although it could exclude the legacy Model S/X.
Dashcam Viewer Updates
Not a Tesla App
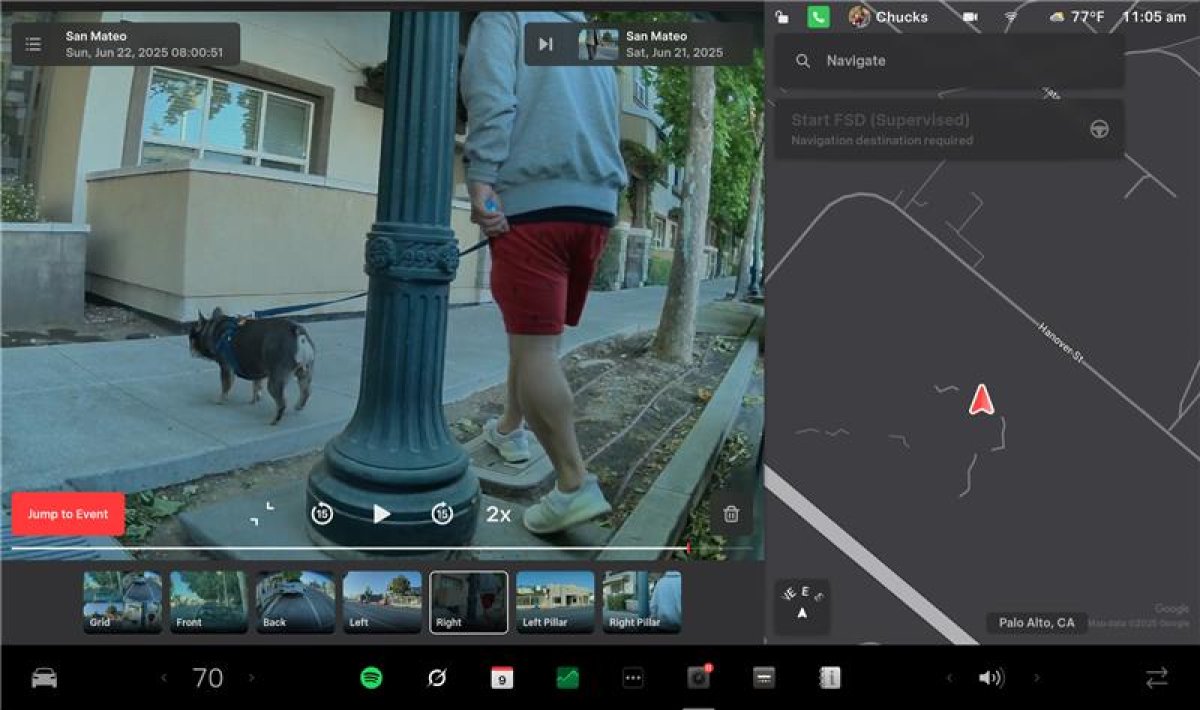
This Dashcam Viewer update is only for AMD-based vehicles. It includes the ability to change the playback speed of the video being played, a feature of the old Dashcam Viewer which was surprisingly not included in the new player.
The playback speed is shown on the screen, and you’ll be able to tap it to cycle between varying speeds. The older Dashcam Viewer lets you choose between 0.5x, 1x, 1.5x, and 2x playback speeds, and this is expected to be the same in this update.
With this update, the new Dashcam Viewer also arrives on the Cybertruck for the first time, which was the only Ryzen vehicle excluded when the update was originally released.
Supported vehicles: All AMD Ryzen-based vehicles.
Supported regions: Assumed to be available everywhere.
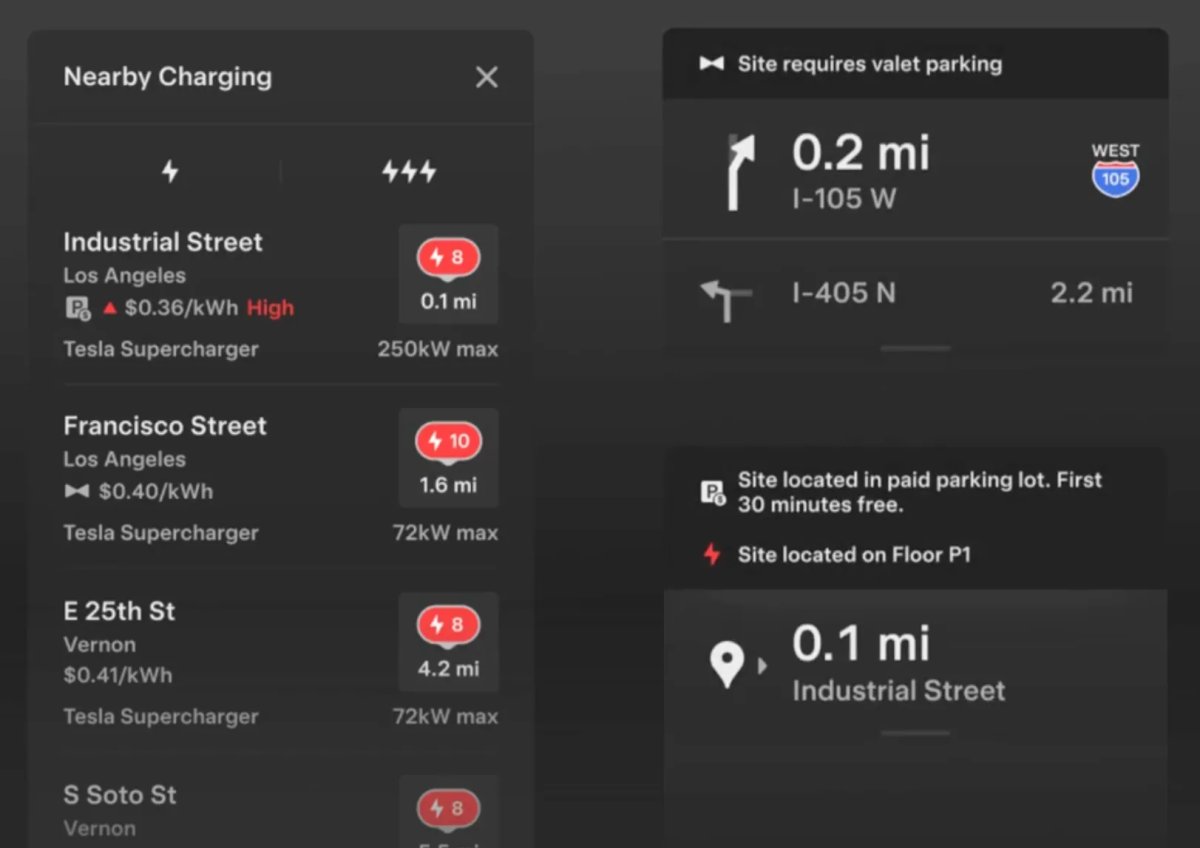
This isn’t as exciting a feature, but it surely prevents a lot of unnecessary frustration for users who arrive at a Supercharger location only to find out it requires you to pay for parking, is only available for valet service, or has other requirements.
If the Supercharger is in a garage, Tesla will now include the floor or level number that the Supercharger is on. While there are usually physical signs at these locations, knowing the floor number the charger is on ahead of time will definitely make it easier to find.
Supported vehicles: Expected to be available on all vehicles.
Supported regions: It’s not clear whether this will be available in all regions.
Onboarding Guide
Not a Tesla App
The last feature that Tesla is highlighting in update 2025.26 is a new onboarding guide that will help new owners become familiar with their vehicles.
According to Tesla, the new guide will run through several features, such as adjusting your seat and mirrors, as well as controlling certain vehicle functions, including the lights, wipers, and Autopilot. This will be a great addition for new owners, as accessing some of these features isn’t apparent, especially if they require use of the unlabeled scroll wheel, such as activating Autopilot on newer vehicles without a stalk.
Supported vehicles: This is expected to only be available on AMD Ryzen vehicles, but Tesla doesn’t specify which vehicles it’ll be available on. Once the update starts rolling out, we should have more information.
Supported regions: This will likely be available in all or most regions.
Release Date
There may be other features included in update 2025.26 that Tesla isn’t highlighting in their post. Tesla often doesn’t include smaller additions or features that were previously introduced but have now been added to more regions.
There’s no doubt that the biggest feature in this update is Grok, but the other updates are nice improvements as well. This feature is expected to roll out to employees this weekend, and it should start rolling out to customers in the next week or two.
Tesla is moving to aggressively expand its Robotaxi Network at a rapid pace, with new information revealing that an expansion into Arizona is imminent, pending, of course, regulatory approval. Tesla has already begun looking at building out the program to other cities, just weeks after the launch of its pilot program in Austin, Texas.
Phoenix, Arizona, is Next
In a letter received following a query submitted by Sawyer Merritt, the Arizona Department of Transportation (AZDOT) has confirmed that Tesla had officially applied for Robotaxi permits on June 26th, 2025. According to AZDOT, Tesla had applied for the permits for both autonomous vehicle testing and operation with and without a safety driver.
The department also confirmed that Tesla has expressed its interest specifically in operating within the Phoenix Metro area, with a decision on the permits expected by the end of July. This is the first official step to establish Robotaxi within a second state, which is exciting to see.
Tesla Hiring Vehicle Operators
The move into Arizona isn’t an isolated event. It’s the first step in a broader national expansion, as per Tesla’s recent job postings for Robotaxi Vehicle Operators and FSD testers on Tesla’s Careers page.
These positions, which are necessary for Tesla to launch and validate the service in new locations, show us where Tesla plans to deploy Robotaxi next. The areas include:
Tempe, Arizona
Palo Alto, California
Fremont, California
San Diego, California
Henderson, Nevada
Jacksonville, Florida
Tesla is simultaneously laying the groundwork for expansion in at least three other states besides Texas and Arizona, and that’s a good sign for the network’s quick expansion. Tesla’s executive cadre pointed to a timeline of late 2025 for Robotaxi to be deployed in multiple cities across the United States, and it appears that this timeline is on track.
The Scalability Advantage
This strategy of pursuing multiple markets in parallel highlights the advantage of Tesla’s generalized autonomy approach. Because FSD is designed to be a generalized solution that learns from a global fleet, Tesla does not need to spend years meticulously pre-mapping every street in a new city.
Instead, it can target new locations and use a smaller fleet of operators to validate the performance and safety of FSD within a new environment. After all, every city has its own unique traffic regulations and environmental considerations that need to be understood.
The key here is that Tesla can turn on a fleet in a whole new location in just a fraction of the time required by other methods, such as HD mapping - which can require hundreds of mapping vehicles, thousands of hours of real humans driving, and many hours of engineering to get all the data cleaned up and ready for use.
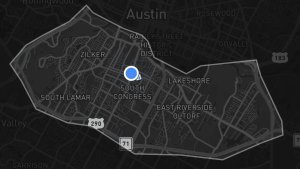
The Austin pilot is just the beginning of Robotaxi. Tesla is already planning to expand the geofence this weekend and plans to scale the network to other cities soon.












![Tesla Software Update 2025.26: Grok, Light Sync, Audio Presets and More [VIDEO]](https://www.notateslaapp.com/img/containers/article_images/tesla-update/light-sync-update.jpeg/e84ab2f1fe12f493a75927db105a9586/light-sync-update.jpg)