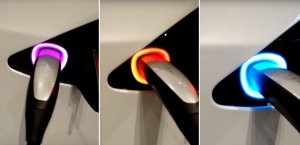
Tesla detecting distance without ultrasonic sensors
salvagEV's/YouTube
Tesla owner and EV mechanic Occupy Mars shared a video of their salvaged 2018 Tesla Model 3 detecting distances without its ultrasonic sensors (USS).
Occupy Mars shared a 10.5-minute video explaining how they discovered this anomaly. Even though the vehicle was running version 2022.28.2, which was released in September 2022, the vehicle managed to measure distances without the use of USS.
Occupy Mars moved the vehicle out of their garage without the front bumper and confirmed that all ultrasonic sensors were disconnected. However, they noticed that their Model 3 was accurately detecting a vehicle next to it and displaying the appropriate distances on the screen. This appears to confirm that Tesla is testing Tesla Vision to detect nearby objects and display distances, but only on vehicles with USS.
Confirming Camera Detection
Interestingly, Occupy Mars' vehicle only detected the distances while in reverse, although a lot of the car is taken apart, so this could have been due to early software or hardware issues. When pulling up closer to the garage, Occupy Mars noticed the Model 3 was not showing the distance between the car and the garage. Instead, it was detecting objects at the corners of the vehicle. This would make sense given the blindspot in front of the vehicle where cameras can not see.
To confirm that the vehicle was using its cameras to determine distances, Occupy Mars covered the front-facing and B-pillar cameras with tape. Once the vehicle's cameras were covered, the car immediately stopped displaying the arcs and distances from nearby objects.
Occupy Mars went a step further to rule out radar use and physically unplugged the vehicle's radar and with the cameras uncovered, the vehicle continued to detect objects and display distances.
Video Showing USS-like Detection Using Vision
The video below by Occupy Mars shows their vehicle detecting distances without utilizing any ultrasonic sensors or radar.
Running Vision in Shadow Mode
What appears to be happening is that Tesla is actively testing and collecting data from vehicles that are equipped with ultrasonic sensors, and it appears they've been doing so for several months. Previously, the USS were fully responsible for detecting distances for nearby objects, but it appears Tesla is now using an updated version of Tesla Vision in shadow mode. This lets Tesla run code in the background to assess its accuracy before having the vehicle or driver rely on it. Tesla then uses the vision-detected distances and compares those values to the output of the vehicle's ultrasonic sensors, letting them assess the new system's accuracy before releasing it publicly.
The Removal of Ultrasonic Sensors
On October 4th, 2022, Tesla announced that they were removing ultrasonic sensors from their vehicles and beginning the transition into their own proprietary “Tesla Vision.” According to Tesla’s announcement, Model 3 and Model Y vehicles built in October 2022 and beyond no longer included the USS. Later, Tesla removed USS from the Model S and Model X as well.
This came as a bit of a shock to drivers and automotive experts, namely the team from Munro Live. The USS are standard in modern vehicles. They’re used to detect distances in tight spaces to enhance the safety of the vehicle. But Tesla believes they can maintain a similar level of safety and accuracy without the USS, despite some outcry from the Tesla community and experts.
Savings Due to the Removal of Ultrasonic Sensors
Tesla is saving an estimated $114 per vehicle by removing the USS, equating to roughly 100 million dollars per year based on Tesla’s volume, per Munro Live. This effort makes sense as Tesla is revamping its Model 3 to cut costs so prospective buyers can take advantage of the new federal tax credit.
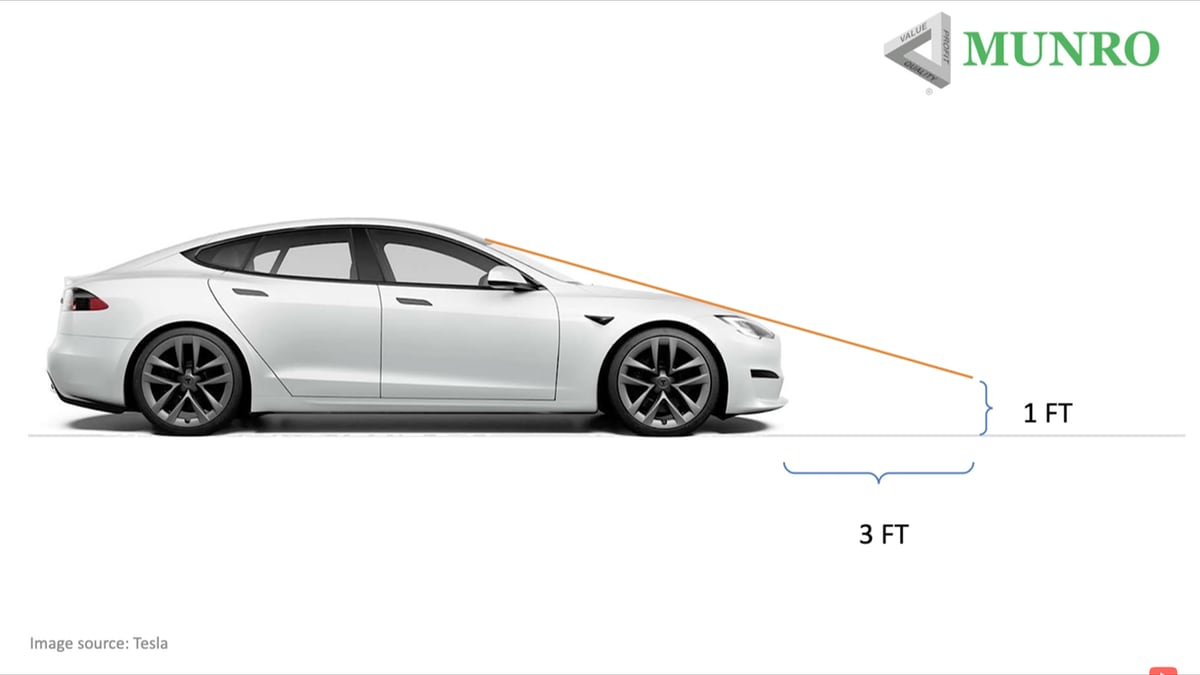
Front Blindspot
Will Teslas have a blind spot directly in front of the vehicle?
Munro Live
As pointed out in the Munro Live video, there is a three-foot blindspot in the front of the vehicle. Tesla’s rumored solution for the three-foot blindspot is to have the vehicle remember what it sees when driving toward an object. But if the vehicle is parked for an extended period and something is placed in front of it, how will the vehicle know where it’s placed or if it has moved?
Tesla could continue processing camera data while parked as they do in Sentry Mode, but this would cause significant battery usage over time.
Tesla may also just leave out the ability to detect objects in front of the vehicle when the vehicle is first started.
Upcoming Update
More recently Tesla owner and hacker GreenTheOnly found code of Tesla testing vision-based USS-type detection in update 2022.40, so it's clear that Tesla plans to address the lack of USS, but it appears the fix is taking longer than expected. Although nothing has been officially communicated by Tesla, we could be close to receiving the long-awaited update that restores USS-type detection.
Subscribe
Subscribe to our newsletter to stay up to date on the latest Tesla news, upcoming features and software updates.
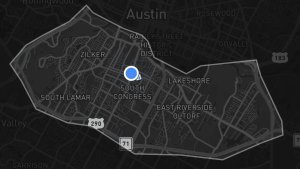
Last night on X, Elon Musk confirmed that Tesla will be expanding the service area for its Robotaxi Network pilot in Austin, Texas, this coming weekend. This is the first official confirmation we’ve had of a date for expansion, following news that Tesla is hiring more Vehicle Operators and plans to expand the Robotaxi supervisor ratio in the coming months.
This is a sign of Tesla’s confidence in the Robotaxi pilot program and its current FSD builds.
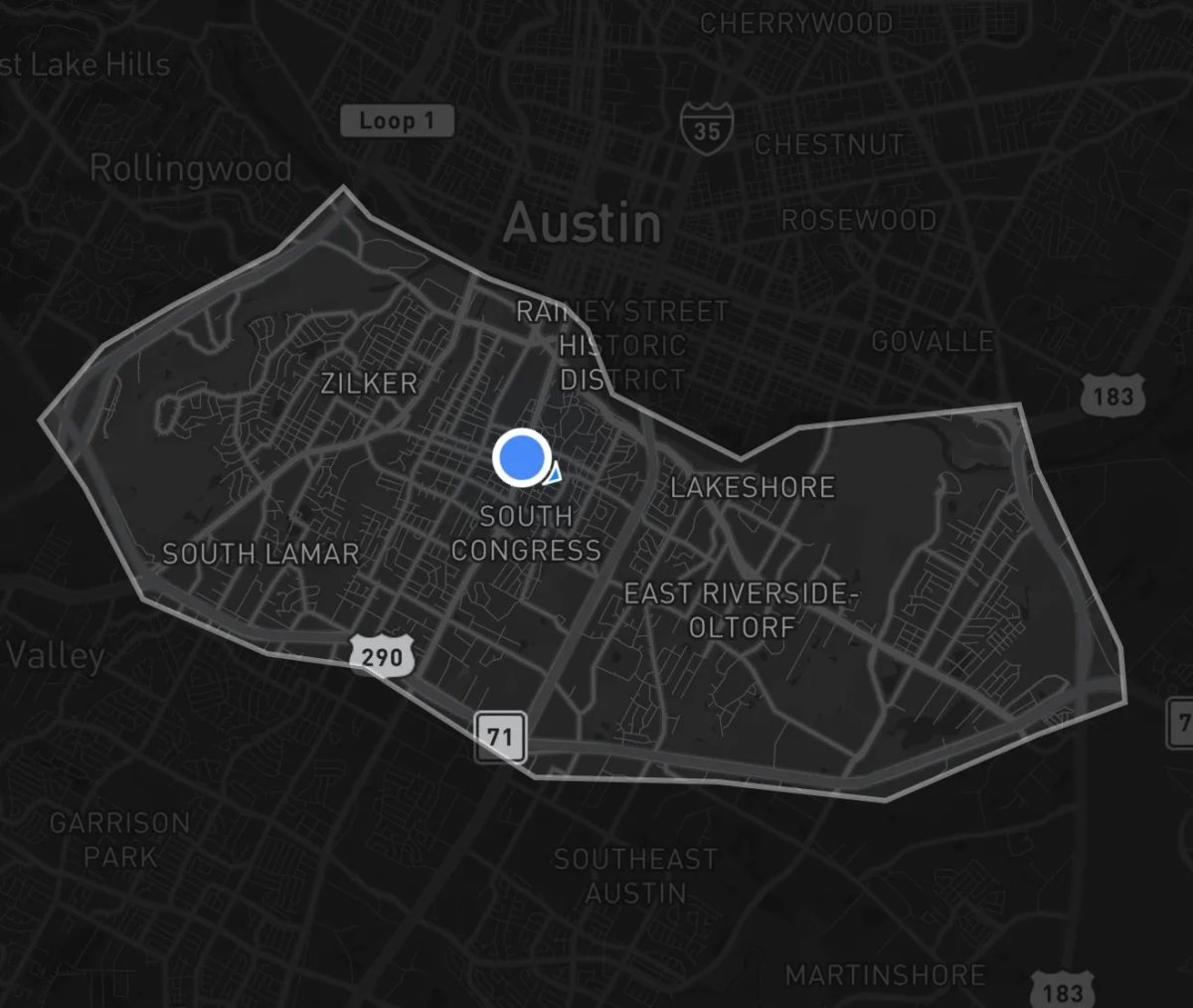
Expanding to a larger service area in Austin this weekend
The announcement confirms the sights we’ve been seeing of Tesla’s engineering validation vehicles focusing on areas outside the initial geofence. This public test shows that Tesla was likely finalizing FSD builds and gathering the necessary safety data to push the boundaries for the service, and this upcoming weekend’s expansion will be the first direct result of that work.
Given the increase in service zone size, this expansion will also likely include the addition of more vehicles to the initial Robotaxi fleet of approximately 20 vehicles. We expect the new number to be anywhere from 30-50 vehicles serving both the original and new areas, combined, based on Tesla’s previously expected rollout schedule.
What to Expect
While the exact new boundaries haven’t been released, it is almost certain that the expansion will include the South Congress Bridge and the downtown core areas of Austin. Expanding into a dense urban zone will include more complex intersections, heavy pedestrian traffic, and a unique road layout. That is a major vote of confidence for Robotaxi FSD’s capabilities.
The expansion will also help Tesla to close the service area gap with Waymo, its primary autonomous competitor in the city. This quick expansion is a sign of just how scalable Tesla’s vision-only approach is, versus Waymo’s arduous and drawn-out mapping processes.
We also expect that with this first service zone expansion, Tesla will continue to invite more people to its Robotaxi Network in the coming weeks. Tesla has already sent out various rounds of events, as they’ll need users to continue using the system. If you’re waiting for an invite, it may be time to start getting excited about the next rollout.
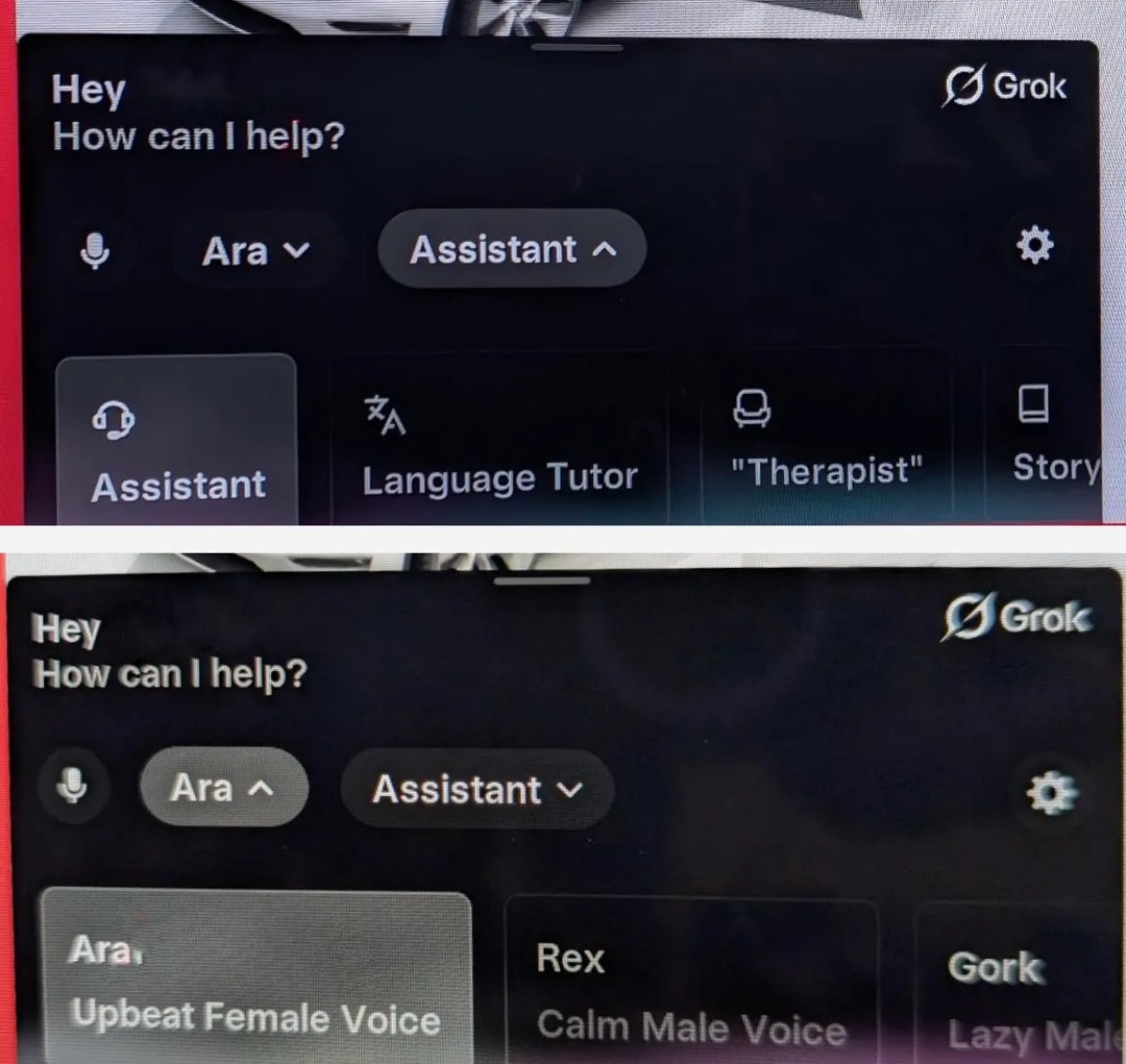
We’ve been hearing about Grok, xAI’s AI assistant, coming to Teslas for almost two years now, but this is finally coming to fruition soon. XAI unveiled Grok 4 last night, but the entire stream didn’t mention Teslas. However, Musk later posted on X that Grok will arrive in Tesla vehicles “by next week.”
Between leaks and the Grok mobile app, there’s a lot we already know about Grok, but there are a few missing pieces that will be cleared when it finally arrives.
Next Week, or Next Next Week?
Musk said that Grok would arrive by next week, meaning it could arrive before then. However, based on how Musk typically states Tesla timelines, there are a few things to consider that give us a better idea of what to expect.
First, whenever Musk posts a Tesla timeline on X, he typically means when it’ll be released to employees and not a public release. Expect this to be the same thing.
Tesla releases software updates to employees first for a final round of testing before starting a gradual release to the public. Sometimes issues are found, especially with FSD updates, and the update needs some fixes before being released publicly. So expect employees to get it by next week, and not necessarily normal Tesla owners.
The second part to this is that Tesla always rolls out their updates gradually, so when it does finally arrive, it’ll only be available on a small percentage of vehicles. Tesla will gradually monitor issues and logs, continuing the rollout as long as no major issues are found.
Which Software Update?
The entire Grok UI was already included in software update 2025.20, but it’s not exposed to users. Typically, a new feature like Grok requires a vehicle update to be added; however, this version may be different, as it’s locked behind a server-side configuration.
Tesla likely has the ability to enable it for all supported vehicles with a simple switch. However, we feel more confident in it being rolled out in Tesla’s next major update, which is likely to be 2025.24 or 2025.26. Rolling it out in a new update aligns with how Tesla has historically introduced features.
If they turned it on for everyone at the same time, they could be exposing everyone to potential new issues, rather than only a smaller segment of users. While Grok is now well-tested through X and the Grok app, there are several elements that are new in Teslas, likely including the ability to control various vehicle functions, such as opening the glove box or other capabilities that voice commands are currently capable of. The Grok interface in the vehicle is also entirely new and may have some bugs associated with it that will need to be addressed, especially if they impact other features.
What we can likely expect is that Tesla will make some tweaks or bug fixes to Grok with the next major update that weren’t included in update 2025.20 and they’ll begin rolling it out to employees and then customers.
Supported Vehicles
Speaking of supported vehicles, thanks to the behind-the-scenes look at Grok, we have a good idea of the vehicles that will be supported. Tesla uses the same code for most of its vehicles, but then it’s compiled for each type of hardware. However, only the needed code is compiled for each vehicle, meaning that some pieces are left out entirely. Unfortunately, Grok code is not included in Intel software builds, meaning that only AMD Ryzen-based vehicles will receive Grok, at least initially.
We’ve seen Tesla go back and add support for Intel vehicles after it initially released a feature for AMD vehicles. We saw this with the weather radar overlay and several other features in the past. However, Tesla has been developing code with web technologies lately. While this makes development easier, it just doesn’t perform as well on the slower Intel hardware, causing it to be left out. We saw this with the new Dashcam Viewer, which is entirely coded in HTML, CSS, and JS. The new viewer was available on HW3 and HW4 vehicles, but only those that included the Ryzen infotainment processor.
Grok is coming to Tesla vehicles very soon. Next week at the latest.
There’s a lot we’re expecting in Grok for Teslas. Some people will absolutely love it because it’ll completely transform their drives from a singular experience to feeling like they have a knowledgeable person sitting right next to them. Given the recent controversies surrounding Grok, some people will strongly oppose it. Hopefully, Tesla makes it easy for those users to turn off Grok.
The voice command system, which is activated through the steering wheel, is expected to be replaced with Grok. This will mean that you’ll be able to talk to your vehicle much more naturally, rather than having to remember specific syntax and commands, which should be a major improvement.
We’re personally looking forward to just being able to ask questions that pop into our heads while driving, such as What’s the date of Tesla’s next event, or How many miles away is Mars? Knowledge will be available at the touch of a finger and more accessible than ever.
Grok is also expected to support continuous conversations, meaning that you’ll be able to hold a conversation with it and go back and forth about a certain topic. While there are hints of a wake word in the code, for now, it seems like you’ll press the steering wheel button once to activate it, and then again to turn it off.
For those excited about AI and Grok, this will be one of the biggest additions to Tesla’s software in years, possibly only rivaled by the Dashcam / Sentry Mode feature and FSD Beta.
It shouldn’t be long now before we all have a chance to try it out for ourselves.




















![Tesla Updates Robotaxi App: Adds Adjustable Pick Up Locations, Shows Wait Time and More [VIDEO]](https://www.notateslaapp.com/img/containers/article_images/tesla-app/robotaxi-app/25-7-0/robotaxi-app-25.7.0.webp/4ac9ed40be870cfcf6e851fce21c43b9/robotaxi-app-25.7.0.jpg)