Cybertruck deliveries will start next year, but if you can't wait that long, you may want to head for Night City. Cyberpunk 2077 has teased that the highly anticipated vehicle in the real world may appear in the popular video game. But, if that's not enough, Elon Musk announced another exciting and unique feature for the futuristic-looking truck - it will be waterproof.
Let's start with the floating Cybertruck, which should not be a shock to anyone following the Tesla CEO. He bought the Lotus Esprit that James Bond used to jump off a pier and transform into a submarine in The Spy Who Loved Me. He purchased the movie prop for just under $1 million in 2013 and told USA Today, "I was disappointed to learn that it can't actually transform. What I'm going to do is upgrade it with a Tesla electric powertrain and try to make it transform for real."
In 2016 he tweeted that the Model S "floats well enough to be a boat," but he did not recommend trying it. Now he has claimed the Cybertruck could be used as a boat — briefly. Musk tweeted: Cybertruck will be waterproof enough to serve briefly as a boat, so it can cross rivers, lakes & even seas that aren't too choppy.
Cybertruck may appear in Cyberpunk 2077 game
Cyberpunk
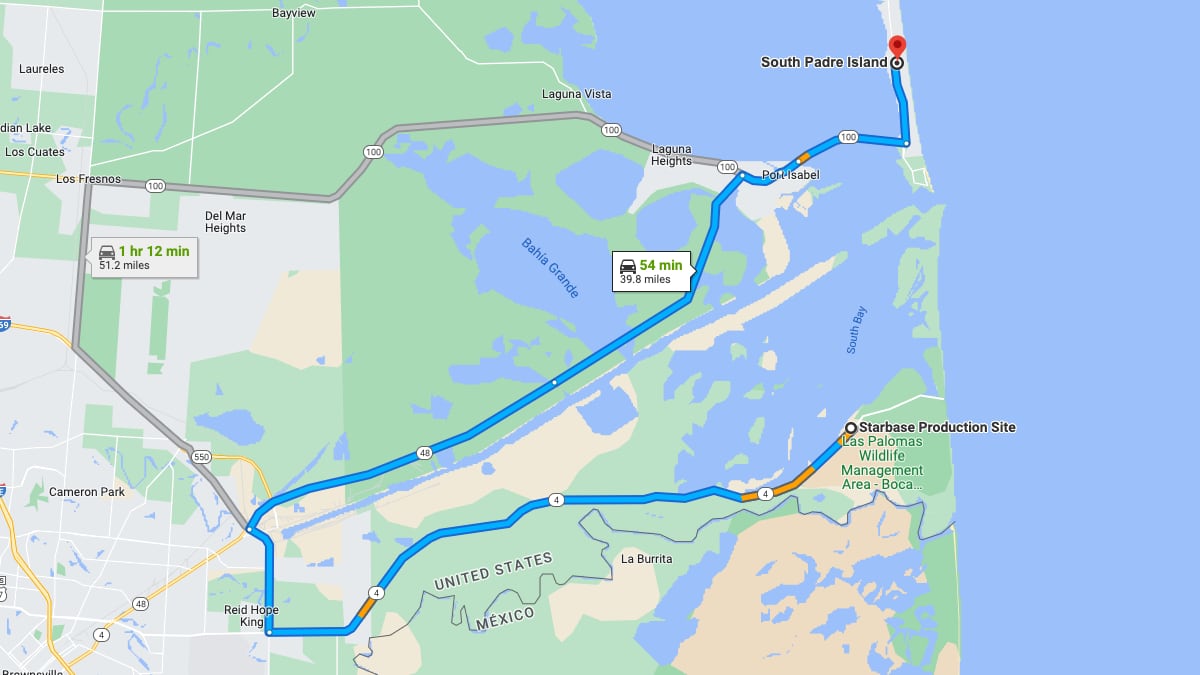
In a later tweet, he gave some idea of the distance he has in mind: Needs be able to get from Starbase to South Padre Island, which requires crossing the channel.
Twitter user @Erdayastronaut shed some light on why Musk would be singling out that area and distance. The tweet reads: "One of SpaceX's biggest problems is attracting talent to work at Starbase, which is extremely remote. South Padre is an awesome place to live, but it's almost an hour drive to Starbase despite being only 5 miles from Starbase because of the shipping channel." A quick check of Google Maps demonstrates what the user is describing.
South Padre is only five minutes from Starbase if you cross the channel
Google
Musk's tweet also caught the attention of the Washington State Department of Natural Resources. Officials there seem to be a little concerned about the wording. The official account tweeted: Our derelict vessel crews are begging you to understand that anything that "serves briefly as a boat" should not be used as a boat.
CD Projekt RED also noticed Musk's tweet, and the makers of Cyberpunk used the opportunity to show two concepts of the Cybertruck as it would appear in Night City. Musk and Cyberpunk have had an ongoing relationship for a few years. Most recently, he demonstrated the power of the onboard computer's gaming system by playing Cyberpunk in a Tesla. However, CD Projekt RED did not mention if the Cybertruck in Cyberpunk would float.
Cyberpunk 2077 will be playable in the new Model S
Subscribe
Subscribe to our newsletter to stay up to date on the latest Tesla news, upcoming features and software updates.
Back in October 2020, Tesla made waves by dissolving its public relations team—an unprecedented move in the automotive industry. Until then, Tesla’s PR department handled media inquiries and influencer outreach directly, building one-on-one relationships with journalists.
That kind of engagement helped shape the narrative, even as Tesla faced a steady stream of negative press. Remember all the “Tesla Killer” headlines? Or the negative stories about Autopilot, EV fires, and other exaggerated claims?
Nearly five years have passed since Tesla PR went the way of the dodo. But is it time to bring them back?
I believe it may be—both as a Tesla-focused journalist and as a longtime follower and customer. As a communications professional, I also bring an understanding of how organizations should communicate with their key stakeholders. For Tesla, that means customers, investors, and partners.
Social Media Isn’t Enough
Tesla primarily communicates through X, often via the personal accounts of its executives. While the company is quick to respond to viral news articles or social media posts it deems inaccurate, this reactive strategy isn’t very effective. It allows misleading information to linger in the public sphere for days, weeks, or even months without correction. To this day, many people still believe Tesla vehicles spontaneously catch fire—a myth that persists largely because Tesla hasn’t made a concerted effort to refute it through official channels.
Relying on social media to combat incorrect information lacks the weight and permanence of a formal press release or official statement. Making matters worse, the overwhelming volume of posts—especially Elon Musk’s 700+ tweets per week—buries key responses, making it unlikely that even the most dedicated followers will see them, let alone the general public.
Expecting Tesla’s leadership, including Elon, to constantly monitor and correct media narratives is not only unrealistic, but also a poor use of executive time. Their focus should be on steering the company, not playing an endless game of digital whack-a-mole. This kind of reactive communication is exactly why a dedicated public relations team is essential—something nearly every major company already understands.
Without a formal PR department, Tesla lacks the infrastructure to request corrections or retractions through proper journalistic channels. Take a recent example: a Tesla executive publicly disputed a false headline, yet the article remains live—with nothing more than a small note saying “Tesla has refuted this.” A tweet may challenge a story, but it doesn’t carry the authority or procedural heft of an official PR statement. As a result, the incorrect information stays alive and continues to shape public perception.
To make matters worse, the majority of people who engage with Tesla’s social media accounts—or with Elon directly—are already supporters or owners. This creates an echo chamber, where rebuttals and clarifications reach only those who already believe in the company, while the broader public and traditional media remain largely untouched.
Communicate with Customers
Tesla’s reliance on social media for communication feels aligned with its future-focused image—but that reliance is also one of its biggest shortcomings. Sharing key updates about product development, software rollouts, or policy changes almost exclusively through X means that crucial information often fails to reach the wider customer base.
Case in point: I recently came across a post in a large Tesla Facebook group where a user was confused about major changes to Full Self-Driving. They hadn’t used it in months, didn’t know V13 had been released, and were completely unfamiliar with the new settings. Their last experience was with V11, and all they wanted was to use FSD for an upcoming road trip.
Information like this—about feature updates, major changes, or even safety-related notices—should be distributed through more direct and dependable channels. For example, do you know how to check if your Tesla has an active recall? Most people don’t. It’s not available in the app or on the vehicle interface; you have to visit a specific page on Tesla’s website. That’s a clear communications gap.
A dedicated PR team could help fix this, establishing a more coordinated and accessible flow of information that doesn’t rely solely on social media. It would also improve the customer experience by making key updates easier to find and understand.
Then there’s the issue of customer feedback. While Tesla executives do receive input via X, that’s not a scalable or representative feedback loop. It leans on the same echo chamber that’s often hesitant to criticize publicly.
Despite Tesla collecting enormous amounts of vehicle telemetry and even voice feedback from FSD users, there’s no clear, public-facing way for customers to offer feedback directly. A good example: the backlash over the deactivation of the 12V sockets in the rear of the Model Y and Model X. It prevented many owners from powering sub-trunk fridges on road trips. Tesla will eventually re-enable the feature via a software update, but never acknowledged the issue, the complaints, or the fix.
Influencers
Tesla’s relationship with the influencer community is also beginning to shift. Historically, the company offered early access to Full Self-Driving features to select influencers, giving them the opportunity to showcase new capabilities before the broader public. But that approach seems to be evolving—early access now appears to be part of a larger, more public rollout strategy. As a result, Tesla-focused content creators, who have delivered significant value to the community, are no longer receiving the same level of support.
This shift is especially evident in the current referral program, which is now capped at 10 referrals. Many of the top influencers across X, YouTube, TikTok, and other platforms maxed out back in January. Under the new rules, they’re also unable to share someone else’s referral code—limiting the reach and impact of their promotion.
While Tesla still occasionally invites major YouTubers to help promote flagship vehicle launches or participate in high-profile interviews, these moments are few and far between. There’s a noticeable absence of a consistent, structured engagement strategy with content creators—a missed opportunity, especially for a company that famously doesn’t spend on traditional advertising.
Public-Facing View
In recent months, Tesla’s brand reputation has come under additional pressure. Much of this stems from the increasingly blurred lines between the company and Elon Musk’s high-profile, and often controversial, political and social commentary—including his public involvement with the current U.S. administration.
Without a dedicated corporate communications team, Tesla lacks a clear, authoritative voice to distinguish the company’s mission, values, and actions from Elon’s personal views. A skilled PR team could play a critical role in defining that line—crafting strategic messaging, issuing official statements that reflect corporate values, and managing the brand independently, while still allowing Elon to remain the public face of the company.
This gap becomes especially evident in moments of public criticism or protest. Tesla’s typical response—a reactive post on X—often falls short in both tone and reach, particularly when addressing complex or sensitive issues. A formal PR function would give Tesla the tools to engage more thoughtfully, issue timely and appropriate responses, and better protect a brand image that increasingly feels unstable.
Concluding Note
Almost five years have passed since Tesla dissolved its dedicated PR team and instead relied on the direct and often unfiltered communication from its executive suite through X. While it is undeniably disruptive and fitting to Tesla’s image, the limitations to this approach are becoming increasingly apparent.
From the struggle to formally correct persistent misinformation to the failure to ensure updates and changes reliably reach its entire customer base, to the underutilized potential of Tesla’s amazing influencer crowd, and the growing challenges of navigating a growingly negative public perception, reinstating a professional PR function wouldn’t be a step backwards.
Instead, it would provide the necessary structure for consistent messaging and proactive reputation management and allow Tesla’s leadership to focus on what they do best - electrifying the world, not responding to posts on social media.
In today’s environment, it’s pretty clear — it’s time for Tesla to bring back PR.
Tesla has just announced the contents and features of its 2025 Spring Update. There’s a lot of new content that we expected, as well as some stuff we didn’t see coming that will be arriving in Tesla’s next major release. Awesome new features, such as Adaptive Matrix High Beams, will finally become available in North America, while others like Grok’s voice assistant aren’t quite ready yet.
So, without further ado, let’s get cracking and take a look at everything in this awesome update.
Adaptive High Beams
The headliner feature of this update is the much-awaited Adaptive High Beams for North America - specifically the United States and Canada. We’ve been waiting a little over a year since it was launched in Europe last year. Tesla faced some regulatory delays in getting this approved, but it’s finally arriving for vehicles with newer headlights.
Adaptive High Beams reduce glare for traffic ahead of you by individually dimming specific pixels on the LED matrix. The feature shipped with the refreshed Model Y first and is now arriving for all other vehicles with matrix headlights. This includes newer Model S, Model 3, Model X, and Model Y vehicles - but not the Cybertruck.
The adaptive headlights in action.
Not a Tesla App
The Cybertruck’s signature headlights are too small to fit the LED matrix, and as such, this feature won’t be supported on the Cybertruck for the time being. Hopefully, Tesla will figure something out, but given that this is a hardware limitation, we don’t expect to see much here.
You can check out our guide on how to determine whether your vehicle is equipped with Matrix Headlights. If your vehicle has the hardware, you will see an Adaptive Headlights option under Controls > Lights > Adaptive Headlights after receiving the Spring Update. This feature will be enabled by default.
Improved Blind Spot Camera for Model S / X
The new blindspot camera in the driver's instrument cluster.
Not a Tesla App
In a surprise addition, Tesla is improving support for the Blind Spot Camera on the 2021+ refreshes of their flagship vehicles. Previously, the blind spot camera on these vehicles would only appear on the primary infotainment screen, not the driver’s instrument panel, which was essentially copied over from the Model 3/Y.
Now, drivers will have the option to choose which display the blind spot camera appears on. A setting under Controls > Display > Automatic Blind Spot Camera will allow drivers to choose “Driver Screen”, so that the blind spot camera appears to the left or right side of the instrument cluster, depending on which turn signal you activate. For these vehicles with an instrument cluster directly in front of the driver, this is a much better implementation of the feature than how it was originally designed.
Dashcam Update - B Pillar Cameras
As part of a much-requested update, given the increased and misguided vandalism against Tesla vehicles, Tesla’s team has finally updated their software to record the B-pillar (upper side) cameras as part of both Dashcam and Sentry Mode.
While this means that Dashcam and Sentry Mode footage will now likely take up more room on your USB drive due to recording two additional cameras, it also means that your vehicle is much better protected. Dashcam and Sentry Mode now record from every camera except for the additional front-facing cameras and the interior camera.
Note: It looks like this feature will be limited to newer vehicles, likely those with AI4.
Improved Dashcam Viewer
The updated dashcam viewer.
Not a Tesla App
The Dashcam Viewer in the vehicle is also being improved with this update. Taking a page from the Tesla app, the app in the vehicle will now display multiple camera feeds at the same time, with users having the option to focus on an individual feed if desired.
Due to the additional cameras being recorded, Tesla is now laying out all the camera feeds along the bottom, instead of at each corner of the screen.
The new UI also reveals that there will be buttons to jump back or forward in 15-second increments, while at the top right, you’ll have a link to the next video, instead of having to go back to the list of videos.
Requirements for Dashcam and Sentry Mode Updates
Unfortunately, there is some bad news regarding compatibility with the B-pillar camera recording and this improved Dashcam Viewer. Tesla says the Dashcam updates will only apply to newer “S3XY” vehicles, but they don’t specify the exact requirement.
Based on previous Tesla posts, where they usually list if a feature requires the AMD Ryzen infotainment processor, this requirement doesn’t sound like an Intel vs AMD issue, but instead one that relies on AI4 hardware, which is responsible for processing the video feeds.
Tesla’s “S3XY” requirement also leaves out the Cybertruck, but this seems like an oversight. Given some previously leaked footage of this feature, we expect the Cybertruck to also receive this feature with the Spring Update.
We recently covered routing options on the site, and we believe a lot of people will be pleased with these additions, so if you’ve been craving improved routing options, keep reading.
There are three new routing options to check out. Users will now be able to pick from three types of routing options when choosing a destination. We originally saw these as part of the navigation source code discovered in December 2024.
Fastest: This offers the quickest path to the destination, ignoring any attempts at efficiency or stopping more often to do short charges.
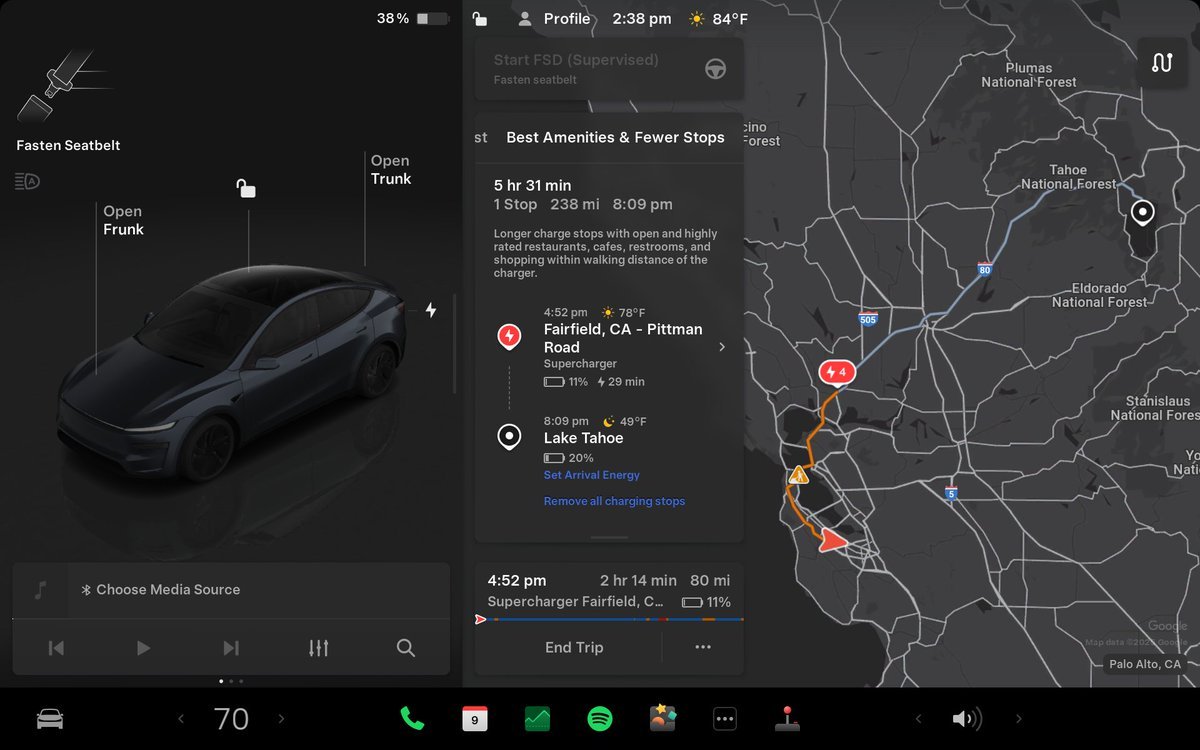
Best Amenities & Fewer Stops:This routing mode minimizes your charge stops in exchange for making them longer, but also allows you to stop near highly rated restaurants, shops, and restrooms for a more relaxing trip.
Avoid Highways: This much-requested feature will enable you to keep your navigation routing away from highways unless they are absolutely required to reach your destination. Hurray for the country roads and relaxed driving.
Requirements: While we’re not sure yet which vehicles will receive these options, we expect it to arrive on all vehicles except for potentially legacy Model S/X.
Trunk Height Based on Location
Another neat and useful little feature: you will now be able to save your trunk opening height based on location rather than applying a general maximum trunk height. If you didn’t already know, you could set the maximum height your automated trunk opens, which can help prevent it from hitting a lower garage ceiling.
This feature is already available on the refreshed Model Y but is now coming to all Model Ys, all Model 3s with automated trunks, and the 2021+ Model S and Model X.
In order to set your height, manually adjust the liftgate to your preferred opening height, and then press and hold the trunk button until you hear a chime in the vehicle, indicating that the height for this location has been set.
Save Frunk Height - Cybertruck
Tesla didn’t forget about the Cybertruck either - you can now do the same with the opening height for the Cybertruck as well. You’ll have to press the exterior (below the bottom center) frunk button and hold it until you hear a chime for the Cybertruck. Pressing the in-frunk button will simply close the frunk.
Accessory Power Option Enables 12V Sockets
Tesla is finally re-enabling 12V accessory power sockets throughout its cars with a new “Accessory Power” option, enabling anyone to use the 12V power sockets in Tesla’s vehicle lineup when they’re away from their vehicle, without needing Camp Mode. This also applies to the USB ports and wireless phone chargers throughout the vehicle.
The Model Y and Model X include a 12V socket in the rear left pillar of the vehicle, alongside a 12V socket in the front of the vehicle. The Model 3 and Model S only have a 12V socket in the front of the vehicle.
You can turn this feature on by going to Controls > Charging > Keep Accessory Power On. This feature is disabled by default and is turned off once the vehicle battery drops to 20% or below. Tesla warns that this feature will use additional power, so it’s best to only use it when needed.
Comfort Drive Mode on the Cybertruck
Following the recent addition of the Comfort Mode option in the Model 3, Tesla is adding the feature to the Cybertruck as well. This feature will automatically switch the vehicle dynamics to “Comfort”, which includes a higher ride height, softer suspension and steering response, and reduction in acceleration profile to Chill Mode while FSD or TACC are active.
You can enable or disable this feature from Controls > Autopilot > Use Comfort Mode in Autopilot. This feature will be enabled by default.
Lane Departure Avoidance on the Cybertruck
Interestingly, the Cybertruck launched without several Autopilot safety and assistance features - namely, because Basic Autopilot itself is missing from the Cybertruck - only FSD and TACC are available. As part of an improvement to safety, Lane Departure Avoidance has now arrived on the Cybertruck with the Spring Update.
This will show a blue indicator on the screen if you begin or are about to begin crossing a lane marking. You will have three options, just like with other Tesla vehicles, including None, Warning, and Assistance. Assistance will provide active feedback and move the vehicle back into the lane lines, while the warning will sound an audio tone and provide visual and physical feedback (vibration) to the steering wheel.
This feature will be enabled by default with Assistance selected and can be changed from Controls > Autopilot > Lane Departure Avoidance.
Minor Updates
Tesla also lists some other smaller details that will be included as part of the 2025 Spring Update, which include these features below:
Keyboard Languages
Go to Controls > Display > Keyboards to switch languages on the touchscreen keyboard.
Media search results are filtered by sources, which provides faster access to your content.
You can now shuffle an entire Apple Music playlist that contains more than 100 songs!
You can scroll through SiriusXM favorites by tapping the left steering wheel button left or right, similar to other services.
You can now sign in to Amazon Music with an Amazon Music Free account. You still require Premium Connectivity or WiFi to stream music.
YouTube Music now shows what song will play next in the Up Next view of the media player.
If you normally connect your vehicle to your phone’s hotspot, this feature will now be enabled every time you drive instead of having you manually connect it each time.
Features We’re Hoping Come Soon
This was an awesome update, but there are always more features we’d love to see come next. Here’s our short list of features we’re still waiting and hoping for.
Everyone’s favorite question is always, When will it be released? Well, it looks like soon. We haven’t seen any vehicles, including employees, receive the Spring Update just yet. However, given that Tesla has officially announced the update, we expect it to go out to employees as soon as this weekend.
Update: Tesla has now started rolling out this update to employees. As expected, it’ll be software update 2025.14.
If no major issues are found, we could see it start rolling out to the lucky first customers in about a week, but be prepared for a slightly longer wait if Tesla needs to reduce multiple revisions of the update before rolling it out publicly.
















![Tesla’s Missing Voice: Why a PR Team Matters More Than Ever [Opinion]](https://www.notateslaapp.com/img/containers/article_images/multiple-models/group_93.jpg/4e1056961f0480c7b9eff43dd2ec288e/group_93.jpg)














_300w.png)










